

Электронная тормозная система (EBS)
Подфункции EBS
- EPB Электропневматическая тормозная система. EPB выполняет функцию электронной регулировки тормозного усилия. Без ABS это выполняется до полной регулировки давления. Дополнительные функции способствуют электронному регулированию тормозного давления, за счет которого осуществляется различное распределение тормозного давления на тормозные цилиндры.
- ABS Антиблокировочная система. ABS регулирует тормозное давление в случае возможной блокировки колес и выключает тормоз-замедлитель.
- ASR Антипробуксовочная система. ASR регулирует тормозное давление на приводных мостах при возможном прокручивании колес и/или уменьшает мощность двигателя.
- ESP Электронная система обеспечения устойчивости. Путем регулировки ESP уменьшает опасность опрокидывания на поворотах и заноса/изгиба поезда на скользкой дороге.
- Система регулировки замыкающего усилия точно согласовывает тормозные усилия тягача и прицепа. Тем самым обеспечивается оптимальное и одновременное торможение обеих частей автомобиля.
- Система экстренного торможения измеряет высоту и интенсивность нажатия тормозной педали. Таким образом определяется намерение водителя выполнить полное торможение (например, резко нажать на тормоз), после чего электрическая система обеспечивает полное тормозное усилие.
EBS состоит из двухконтурной чисто пневматической и наложенной одноконтурной электропневматической цепи управления. Конструкция нижележащей двухконтурной пневматической цепи управления в целом соответствует конструкции обычной тормозной системы. Электронное регулирование тормозного давления выполняется пневматическим контуром управления (резервным контуром), который включается автоматически при сбое электропитания. Стояночная тормозная система обычная, действует механически с пневматической передачей сигнала.
Характеристики EBS для грузовых автомобилей
- Стандартная стояночная тормозная система: с механическим управлением и пневматической передачей сигнала.
- Рабочая тормозная система: с одноконтурной тормозной системой с электронным регулированием от бортового напряжения и с двухконтурным пневматическим резервным контуром.
- Бортовое напряжение 24 вольта, резервное давление до 12,5 бар, давление в тормозных цилиндрах до 10 бар.
- Пневматическая двухпроводная тормозная система со стандартным модулем управления прицепом.
- 7-контактное электрическое штекерное соединение по DIN ISO 7638 между тягачом и прицепом.
- Блок управления EBS с шиной CAN для передачи данных:
- Шина данных CAN трансмиссии – блок управления EBS к остальным системам на автомобиле.
- Шина данных CAN прицепа – блок управления EBS тягача/прицепа по DIN ISO 7638.
- Шина данных CAN тормозной системы – блок управления EBS к модулям регулировки давления на тягаче и прицепе.
- Шина данных CAN датчиков – блок управления EBS к датчикам ESP (датчик угла поворота и датчик угла поворота рулевого колеса).
- Одноканальные/двухканальные модули регулировки давления с интегрированной электроникой.
- Модуль управления прицепом служит для электронной регулировки стандартных прицепов.
- Датчик частоты вращения и датчики тормозных накладок подключены непосредственно к модулям регулировки давления.
- Функция ASR с регулятором тормозов и двигателя осуществляется с помощью шины данных CAN трансмиссии.
- Дополнительный функциональный переключатель (например, повышения порога пробуксовки ASR).
- Программируемая с помощью EOL конфигурация системы и характеристики давления по индивидуальным критериям оптимальности (одинаковая установка всех колесных тормозов, распределение давления, износ тормозных накладок, одинаковая сила сцепления, максимальная задержка).
- Система регулировки замыкающего усилия (только вместе с модулем управления прицепом).
- Регулировка износа тормозных накладок, функциональный сигнализатор предельно допустимого износа тормозных накладок.
- Диагностика осуществляется с помощью диагностической розетки X200 ("KWP-on-CAN").
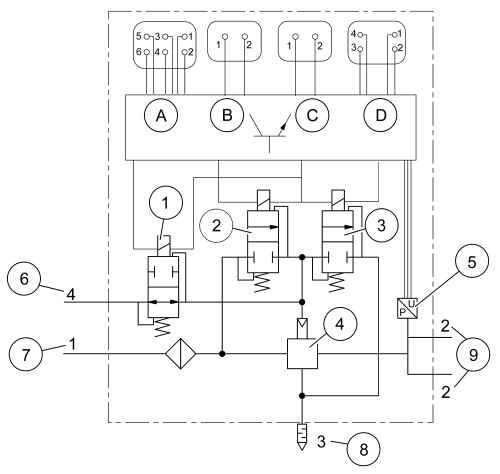
Функциональная схема и схема электрических соединений (грузовые автомобили 4x2)

--------- пневмопроводы
- - - - - электрические провода
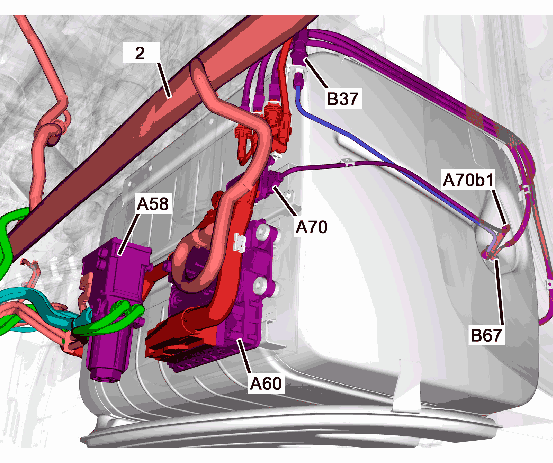
1 Блок управления EBS (A402)
2 Рабочий тормозной клапан с интегрированным тормозным датчиком (G7.310/B337)
3 Модуль регулировки давления переднего моста справа (G67.310/Y262)
4 Датчик частоты вращения переднего моста справа (B120)
5 Датчик тормозной накладки переднего моста справа (B332)
6 Датчик тормозной накладки переднего моста слева (B333)
7 Датчик частоты вращения переднего моста слева (B119)
8 Модуль регулировки давления переднего моста слева (G67.310/Y263)
9 Модуль управления прицепом (G17.310/Y278)
10 Модуль регулировки давления заднего моста (G67.311/Y264)
11 Датчик частоты вращения заднего моста справа (B122)
12 Датчик тормозной накладки ведущего моста справа (B334)
13 Датчик тормозной накладки ведущего моста слева (B335)
14 Датчик частоты вращения заднего моста слева (B121)
15 Розетка прицепа ABS (X317)
16 Диагностическая розетка (X200)
Принцип действия компонентов
Транспортное положение
Если зажигание включено, блок управления EBS (1) приводится в действие. Если неисправности отсутствуют, включается EBS при отпущенной тормозной педали. Электропитание EBS поступает от бортовой электрической сети. Все электромагнитные клапаны в тормозной системе оказываются обесточенными при выключении тормоза.
Если зажигание выключено и рабочий тормозной клапан приведен в действие, включается блок управления EBS (X1/6) с помощью сигнала "Wake up" от рабочего тормозного клапана (B337, Pin 3). Это обеспечивает электропневматическое регулирование давления также и при выключенном зажигании.
EPB - Электропневматическая тормозная система
Рабочий тормозной клапан (2) приводится в действие. Интегрированный в рабочий тормозной клапан тормозной датчик отправляет электрический сигнал в блок управления EBS (1). На основании норм EOL генерируется номинальное значение тормозного давления. Оно передается штекерному соединению прицепа (15) (шина данных CAN прицепа). Кроме того, номинальные значения, полученные блоком управления EBS, поступают по шине данных CAN тормозной системы в модули регулировки давления (3, 8, 10). Они автоматически регулируют тормозное давление включенных последовательно тормозных цилиндров.
Номинальные значения, которые передаются из блока управления EBS в модули регулировки давления, соответствуют нагрузке мостов. Масса автомобиля определяется с помощью сигналов датчиков частоты вращения (частоты вращения колес) тягача и сигнала CAN прицепа.
Торможение посредством резервного контура
В тягаче регулируются два пневматических тормозных давления независимо от электрического сигнала тормозного датчика рабочего тормозного клапана (2). Они поступают в модули регулировки давления (3, 8, 10) тягача.
Пневматическое тормозное давление при торможении, регулируемом электронной системой, поддерживается в модулях регулировки давления в "резерве". Пневматическое давление рабочего тормозного клапана назначается в тягаче также в модуле управления прицепом (9). Модуль управления прицепом регулирует давление соединительной головки тормозной системы и резервное давление соединительной головки.
Торможение посредством резервного контура (без "резерва" на модуле регулировки давления) выполняется в следующих случаях
- Блок управления EBS не отправляет электрическое номинальное значение в отдельные или все модули регулировки давления
- Блок управления EBS отключил при обнаружении неисправности отдельные или все модули регулировки давления.
При торможении посредством резервного контура на электромагнитные клапаны в модулях регулировки давления (3, 8, 10) не подается электропитание. Тормозное давление, регулируемое рабочим тормозным клапаном (2) и назначенное на входе управления модулем регулировки давления, оказывает воздействие на ускорительный клапан в модуле регулировки давления и модуль управления прицепом. Эти модули регулируют пропорционально давление подключенной питающей магистрали в тормозном цилиндре и в магистрали тормозного привода прицепа.
Антиблокировочная система (ABS)
Датчики частоты вращения (4, 7, 11, 14) подключены к входам модулей регулировки давления (3, 8, 10). Сигналы передаются в блок управления EBS (1) по шине данных CAN тормозной системы, блок управления определяет базовую скорость движения автомобиля и другие параметры, которые затем снова передаются по шине данных CAN тормозной системы в модули регулировки давления.
ABS при электропневматической тормозной системе (EPB с электрическим номинальным значением)
Каждый модуль регулировки давления понижает тормозное давление относительно заданного номинального значения в канале регулировки в соответствии с допустимой величиной скольжения.
ABS и тормоз-замедлитель
На выходе реле тормоза-замедлителя (A402) определяется наличие регулировки ABS, которое отображается в виде информации "ABS активна" сообщения EBC1 на шине данных CAN трансмиссии.
Сигналы генерируются:
- во время рабочего торможения с ABS
- если не включен рабочий тормоз при повышенном скольжении
Тормоз-замедлитель отключается с помощью этих сигналов во время регулировки ABS.
Способы регулировки автомобилей с ABS
EBS доступны четыре стратегии регулировки, которые активируются в зависимости от комбинации модуля регулировки давления с датчиком частоты вращения и программированием EOL.
- Индивидуальное регулирование (IR)
- Модифицированное индивидуальное регулирование (IRM)
- Регулирование Select-low (SL)
- Регулирование Select-smart (SSM)
- Индивидуальное регулирование (IR)
Тормозное давление в канале регулировки регулируется индивидуально в соответствии с режимом частоты вращения контролируемого колеса. При разных значениях коэффициента трения шин о полотно дороги слева/справа соответствующие, однако различные силы торможения создают момент рыскания автомобиля относительно вертикальной оси. Этот способ регулировки применяется преимущественно на неуправляемых мостах и помогает контролировать реакции автомобиля при торможении.
- Модифицированное индивидуальное регулирование (IRM)
Тормозное давление в двух каналах регулировки регулируется индивидуально в соответствии с режимом частоты вращения контролируемых колес. Для еще незаблокированного колеса все же ограничивается максимально возможное тормозное давление по сравнению с колесом, которое уже регулируется ABS. Поддерживаются минимальные моменты рыскания без существенного увеличения пути торможения. Применяется преимущественно на управляемых мостах (в зависимости от нагрузки на мост).
- Регулирование Select-low (SL)
Тормозное давление в канале регулировки регулируется в зависимости от режима частоты вращения двух контролируемых колес. Кроме того, тормозное давление регулируется с использованием датчиков на том колесе, которое блокируется первым (выбирается Low-Rad). На колесо, которое движется при высоком коэффициенте трения (ведущее колесо моста с большим сцеплением с дорогой), не передается тормозная сила. Регулирование SL положительно влияет на устойчивость автомобиля, а на путь торможения – отрицательно. Применяется на мостах с одноканальным модулем регулировки (например, на управляемом поддерживающем мосту) или применяется одностороннее регулирование SL.
- Регулирование Select-smart (SSM)
Тормозное давление в канале регулировки регулируется в зависимости от режима частоты вращения двух контролируемых колес. При разных значениях коэффициента трения дорожного покрытия на контролируемых колесах устанавливается более высокое тормозное давление в результате интеллектуальной оценки, чем при SL. Это приводит к увеличению среднего значения тормозной силы. На колесе с более низким коэффициентом трения (ведущем колесе моста с меньшим сцеплением с дорогой) появляются короткие фазы блокирования, в которых регулировка выполняется по Select-high (SH). Применяется на мостах с одноканальным модулем регулировки или применяется одностороннее SSM.
ASR - регулирование антипробуксовочной системы
Электроника определяет проворачивание ведущих колес при трогании с места и ускорении по разности скоростей приводных и неприводных колес и понижает крутящий момент двигателя (регулятор двигателя).
При разных значениях коэффициента трения справа/слева (µ-split) в основном проворачивается только колесо на дорожном покрытии с наименьшим коэффициентом трения. Проскальзывающее колесо притормаживается с помощью регулятора торможения ASR. Движущий момент активируется только на колесе с высоким значением коэффициента трения. Таким образом ASR выступает в качестве автоматической блокировки дифференциала. Для выполнения измерений на испытательном стенде следует отключить ASR.
Регулятор двигателя ASR
При одинаковом проворачивании ведущих колес движущий момент двигателя уменьшается настолько, чтобы средняя скорость вращения приводных колес заднего моста незначительно превышала скорость вращения неприводных колес переднего моста. Блок управления EBS выдает необходимый для понижения сигнал в электронную систему управления дизелем Electronic Diesel Control (EDC) по шине данных CAN трансмиссии. Регулятор двигателя активируется при любом диапазоне скоростей.
Связь с блоком управления EDC
Связь с автомобильным компьютером (A403) поддерживается с помощью шины данных CAN трансмиссии, от него по шине данных CAN двигателя – с блоком управления EDC (A435).
Off-Road-ASR (ASR при движении по бездорожью)
Нажатием на клавишу ASR-Off-Road регулируется пробуксовка при особых условиях движения по бездорожью. Контрольная лампа ASR-Info (информационный дисплей) на приборной панели сигнализирует водителю об активации этого специального режима, или в виде пиктограммы индицируется информация "ABS-Off-Road switch active". Эта функция деактивируется при повторном нажатии на клавишу или выключении зажигания.
Регулятор торможения ASR
Проскальзывающее колесо постепенно притормаживается и контролируется датчиком давления и датчиком частоты вращения. При торможении скорость проскальзывающего колеса понижается, а скорость приводного колеса повышается посредством движущего момента. Скорости ведущих колес вследствие этого синхронизируются.
При скорости более 40 км/ч регулятор торможения не активируется. Если он работает во время ускорения при более низкой скорости, то он остается включенным при соответствующем режиме регулировки до следующего переключения передачи более 40 км/ч. Блок управления EBS не может установить термическую нагрузку колесных тормозов с помощью регулятора торможения ASR. Применение соответствующего режима пуска предотвращает возможную перегрузку при длительном регулировании ASR.
При слишком низком резервном давлении в одном из тормозных контуров регулятор торможения ASR отключается примерно через секунду. По этой причине от блока управления EBS поступает напряжение для красной сигнальной лампы, или считывается информация о резервном давлении в сообщении "Резервное давление" по шине данных CAN трансмиссии
Система регулировки силы сцепки
Тормозное действие между тягачом и прицепом точно согласуется друг с другом. Электрическая система автомобиля должна быть определять качество тормозов прицепа. Для этого в качестве эталона используются первые торможения автопоезда. Затем выполняется обработка данных тормозного давления, датчиков частоты вращения, определяется масса тягача и прицепа.
Затем регулируется пороговое давление тормозной системы прицепа или полуприцепа.
Автоматическая компенсация шин
Система оснащена автоматической компенсацией шин. После замены шин существует возможность подключения регулятора двигателя ASR перед завершением адаптации балансировки шин.
Это может быть прервано нажатием клавиши ASR-Off-Road. Через несколько минут свободного движения на прямом дорожном полотне без торможения адаптация завершается, и клавиша ASR-Off-Road снова выключается.
Компоненты EBS
Блок управления EBS (A402)
Электронный блок управления служит для управления и контроля тормозной системы с электронным регулированием. Электропитание поступает от центральной электрической сети. В блок управления EBS (A402) интегрирована функция ESP.
Передача данных
- в остальные системы осуществляется по шине данных CAN "Трансмиссия"
- между тягачом и прицепом по шине данных CAN "Прицеп"
- к модулям регулировки давления в автомобиле с тягачом и прицепом по шине данных CAN "Тормоз"
- к датчикам ESP по шине данных CAN "Датчик".
Устройство управления программируется по методу "EOL" (End Of Line). Чтобы ввести параметры завода-изготовителя системы, на выходе автомобиля с конвейера завод-изготовитель автомобиля также вводит индивидуальные параметры автомобиля. Ввод параметров проверяется с помощью диагностического сканера, при необходимости можно изменить их.
Тормозной датчик (B337)
Тормозной датчик интегрирован в рабочий тормозной клапан. Электропитание поступает от блока управления EBS (A402).
1-канальный модуль регулировки давления (Y262/Y263)
На переднем мосту справа и слева установлен 1-канальный модуль регулировки давления с интегрированной электроникой. Электропитание поступает от блока управления EBS (A402). Передача данных из модулей регулировки давления в блок управления EBS осуществляется по шине данных CAN "Тормоз".
Модуль регулировки давления 2-канальный (Y264)
На заднем мосту установлен 2-канальный модуль регулировки давления (Y264) с интегрированной электроникой. Электропитание поступает от блока управления EBS (A402). Передача данных из модуля регулировки давления в блок управления EBS осуществляется по шине данных CAN "Тормоз".
Модуль управления прицепом (Y278)
Для обеспечения эксплуатации автомобиля с прицепом установлен модуль управления прицепом. Блок управления EBS (A402) осуществляет функции электропитания и управления электромагнитными клапанами. Основной функцией модуля управления прицепом является регулирование тормозного давления в магистрали тормозного привода прицепа (разъем 22). Стояночный тормоз и функция срабатывания при отрыве работают обычным образом.
Устройство датчика частоты вращения
Устройство датчика частоты вращения состоит из зубчатого импульсного ротора и индуктивного датчика частоты вращения (B119/B120 передний мост, B591/B592 2-й передний мост, B121/B122 ведущий мост).
Датчики частоты вращения электрически подключены к модулям регулировки давления. При вращающемся колесе в датчике скорости вращения вырабатывается переменное напряжение, частота которого пропорциональна скорости колеса.
Датчик тормозной накладки
Каждый колесный тормоз контролируется датчиком тормозной накладки. В 1-канальных модулях регулировки давления (Y262/Y263) на переднем мосту подключены датчики B332 (справа) и B333 (слева). При наличии 2-го переднего моста к этим 1-канальным модулям регулировки давления дополнительно подключаются датчики B537 и B538.
В 2-канальном модуле регулировки давления (Y264) на задних мостах подключаются на мост по два датчика (B334/B335 – на ведущем мосту и B529/B530 – на дополнительном мосту).
На датчики поступает электропитание только во время торможения, за исключением инициализации после включения зажигания. По завершении процесса торможения регистрируются электрические сигналы в модулях регулировки давления. Передача данных осуществляется по шине данных CAN "Тормоз".
Розетка прицепа
Электропитание розетки прицепа (X317) поступает от центральной электрической сети (А100). Передача данных от тягача к прицепу осуществляется по шине данных CAN "Прицеп" (X317 Pin 6 и Pin 7)
Для обеспечения взаимозаменяемости тягача и прицепа эксплуатация EBS прицепа предполагает наличие следующих компонентов:
- Двухпроводная пневматическая тормозная система с резервным трубопроводом подачи сжатого воздуха и магистралью тормозного привода.
- Штепсельный разъем для ABS, с полной разводкой, Pin 6 и 7 (7-контактный соединительный кабель).
ОСТОРОЖНО: Если в прицеп интегрирована EBS, то тягач и прицеп соединяются только 5-контактным соединительным кабелем ABS, и применяется обычный пневматический контур управления.
Совместимость различных тормозных систем
Кроме комбинаций автомобилей из тягачей и прицепов с EBS возможны комбинации тягачей EBS с обычными прицепами, а также прицепами, соответствующими стандартам ISO 11992 и ISO 7638 (7-контактными).
Усилие, воздействующее на прицеп, зависит от пневматических проводов, электропитания, а также магистралей тормозного привода, которыми соединяются тягач и прицеп.
В нижеследующей таблице представлены возможные комбинации для:
Тягач с EBS и прицепы с различным оснащением (см. комбинации автомобилей 1-5)
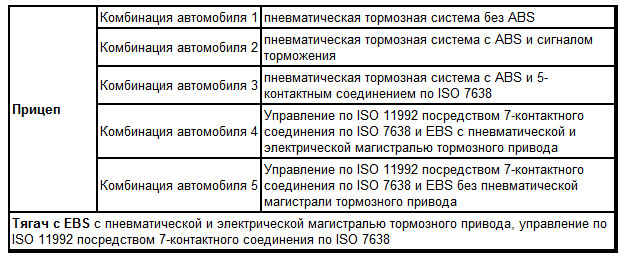
Функции прицепа в следующих комбинациях автомобиля.
1 Подключение прицепа к тягачу осуществляется с помощью пневматической двухпроводной системы, и торможение выполняется в соответствии с его комплектацией.
2 Подключение прицепа к тягачу осуществляется с помощью пневматической двухпроводной системы, и торможение выполняется в соответствии с его комплектацией, включая ABS с сигналом торможения.
3 Подключение прицепа к тягачу осуществляется с помощью пневматической двухпроводной системы и 5-контактного соединения ABS, и торможение выполняется в соответствии с его комплектацией, включая ABS по нормам ISO 7638.
4 Подключение прицепа к тягачу осуществляется с помощью пневматической двухпроводной системы и 7-контактного соединения EBS, и торможение выполняется в соответствии с пневматическим давлением в магистрали тормозного привода или с номинальным значением шины данных CAN "Прицеп". Выбор осуществляется в соответствии с указаниями директивы о тормозной системе прицепа.
5 Прицеп подключен к тягачу с помощью резервного пневмопровода и 7-контактного соединения EBS. По шине данных CAN "Прицеп" от тягача поступает кодовый сигнал о поступлении электрического сигнала торможения из электрической одноконтурной бортовой сети. В соответствии с указаниями в дополнении к директиве о тормозной системе выполняется автоматическое торможение прицепа. При этой комбинации движение категорически запрещается.
Осторожно! Если в прицеп интегрирована EBS, то тягач и прицеп соединяются только 5-контактным соединительным кабелем ABS, и функция в прицепе соответствует
комбинации № 3.
Функциональная схема и схема соединений (прицеп)

--------- пневмопроводы
- - - - - электрические провода
1 Розетка прицепа ABS
2 Блок управления EBS
3 Датчик ALB (датчик давления)
4 Датчик тормозной накладки
5 Датчик частоты вращения
6 Модули регулировки давления
7 Резервное реле давления
8 Тормозной клапан прицепа
Функция в прицепе
Прицеп, как в обычном автомобиле, обслуживается посредством устройства с двумя линиями. При функционировании EBS в блок управления EBS поступает сигнал о процессе торможения через 7-контактную розетку прицепа ABS через Pin 6 (CAN High) и Pin 7 (CAN Low).
Даже если автомобиль снабжен только 5-контактной розеткой прицепа, осуществляется электронное регулирование торможения, поскольку блок управления определяет номинальное значение давления через пневматический резервный контур. Тем самым поддерживаются все функции регулировки давления, как регулирование ALB посредством датчика ALB, так и ABS.
Электронная система обеспечения устойчивости (ESP)
Общая информация
Система ESP, базирующаяся на системе ABS, которая при торможении колес защищает их от блокировки, и на системе ASR, которая предотвращает пробуксовку колес при ускорении, обеспечивает стабилизацию характеристик движения при критических режимах. Статистика аварий показывает, что примерно 15% всех аварий вызвано заносами автомобилей, особенно если дорожное полотно обладает низким или средним коэффициентом трения (из-за льда, снега, дождя). В частности, ESP срабатывает при совершении быстрых объездов, во время панических реакций, предотвращает недостаточную либо избыточную поворачиваемость, а также потерю продольной устойчивости. Также и при меняющихся характеристиках дорожного полотна (значения коэффициента трения) система ESP посредством торможения отдельных колес и вмешательства в управление двигателем действует таким образом, чтобы стабилизировать движение автомобиля. При вмешательстве ABS и ASR, прежде всего в динамику продольного движения, ESP имеет дополнительную задачу по стабилизации автомобиля по вертикальной оси. Другими словами, регулируется момент рыскания. Под рысканием понимается вращение вертикальной оси автомобиля.
Типы автомобилей и варианты/модификации
ESP - это система, регулирующая динамику автомобиля с помощью тормозов. Она зависит от фактической динамики автомобиля и, следовательно, от фактических характеристик движения. Фактические характеристики движения, с другой стороны, зависят от типа автомобиля и от его конфигурации. Следовательно, система ESP должна подходить к конкретному типу автомобиля (целевому автомобилю), которому соответствуют определенные варианты.
Изменения в автомобиле
Функция ESP с относящимся к ней набором параметров регулировки настроена на определенный тип автомобиля. В приведенной ниже таблице приведены для примера основные параметры автомобиля, которые влияют на определение параметров функции ESP.
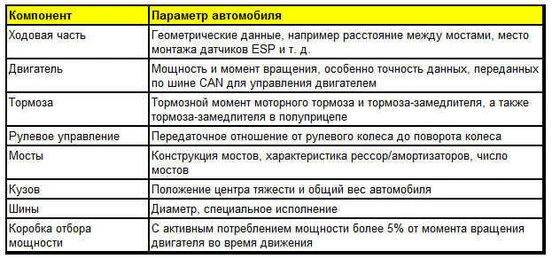
Внимание: Изменения в автомобиле, которые влияют на параметры и/или изменяют характеристики движения и/или управляемости автомобиля, не допускаются без проверки ESP. Производительность ESP может особенно снизить настройка двигателя без согласования передаваемых данных двигателя.
Компоненты ESP
Блок управления для регулировки динамики движения ESP (A402)
Функция ESP интегрирована в блок управления EBS (A402).
Датчик угла поворота рулевого колеса (B475)
Датчик угла поворота рулевого колеса представляет собой самоконтролируемый датчик, который относится к концепции безопасности ESP. Сигналы датчика передаются по шине данных CAN в блок управления EBS/ESP.
Датчик скорости вращения и поперечного ускорения (B476)
Он представляет собой комбинированный механический микродатчик частоты вращения и поперечного ускорения. Выходные сигналы (о скорости вращения и поперечном ускорении) передаются по шине данных CAN в блок управления EBS/ESP.
Интерфейс для других систем
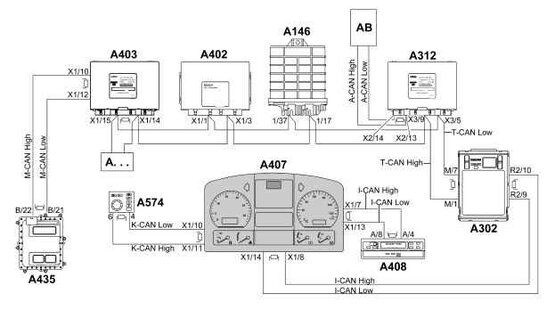
Следующие блоки управления связаны с приборной панелью через шину данных CAN трансмиссии (T-CAN), шину данных CAN кузова (A-CAN), шину данных CAN Highline (H-CAN), шину данных CAN тахоспидографа (FS-CAN), шину данных CAN двигателя (M-CAN) и шину данных CAN приборной панели (I-CAN).
Сообщение о неисправности или выходе из строя системы (напр., EBS, EDC, ECAS и т. д.) передается на центральный бортовой компьютер через шину данных CAN трансмиссии (Т-CAN). Также и отсутствие регулярно ожидаемого сообщения CAN опознается как ошибка ожидания, которая при известных условиях индицируется, например, если устройство управления из-за полного отказа больше не принимает участия в передаче данных через CAN. Центральный бортовой компьютер отправляет сигнал через шину данных CAN приборной панели (I-CAN) на приборную панель. Там неисправность отображается при помощи контрольных лампочек и индицирования на дисплее для символьной и текстовой индикации, предоставляя необходимые водителю сведения.
Структура шины данных CAN
TGA

A143 Устройство управления ECAS
A144 Управление замедлителем/трансмиссионным тормозом
A148 Радиоприемник/Проигрыватель кассет
A302 Центральный бортовой компьютер 2 (ZBR2) с сопротивлением нагрузки I-CAN
A312 Пользовательский модуль управления с сопротивлением нагрузки A-CAN
A330 Устройство управления AS-TRONIC (на коробке передач)
A384 Блок управления колесами заднего моста (RAS-EC)
A402 Блок управления EBS/ESP
A403 Автомобильный компьютер с нагрузочными резисторами М-CAN и T-CAN
A407 Приборная панель с нагрузочными резисторами H-CAN, FS-CAN и I-CAN
A408 Тахоспидограф с нагрузочным резистором FS-CAN
A409 Устройство управления ECAM с сопротивлением нагрузки T-CAN
A435 Блок управления EDC с нагрузочным резистором M-CAN
A479 Управление ACC
A574 Устройство управления MMI
A577 Бортовой модуль Telematik
A609 Блок управления LGS
A635 Truck-Gate с сопротивлением нагрузки H-CAN
A ... Другие системы с возможностью объединения в сеть
AB Электроника кузова на разъеме CAN, например, системы FMS
A-CAN Шина данных CAN кузова (одновременное подключение для интерфейса FMS)
FS-CAN Шина данных CAN тахоспидографа
H-CAN Шина данных CAN Highline
I-CAN Шина данных CAN приборной панели
M-CAN Шина данных CAN управления двигателем
T-CAN Шина данных CAN трансмиссии
Грузовые автомобили высокой проходимости (Х-типы)
A146 Блок управления коробки передач
A302 Центральный бортовой компьютер 2 (ZBR2) с сопротивлением нагрузки I-CAN и T-Can
A312 Пользовательский модуль управления с сопротивлением нагрузки A-CAN
A402 Блок управления EBS/ESP Knorr
A403 Автомобильный компьютер с нагрузочными резисторами М-CAN и T-CAN
A407 Приборная панель с сопротивлениями нагрузки I-CAN и K-CAN
A408 Тахоспидограф с сопротивлением нагрузки I-CAN
A435 Блок управления EDC с нагрузочным резистором M-CAN
A574 Устройство управления MMI с нагрузочным резистором K-CAN (только для приборной панели Highline)
A ... Другие системы с возможностью объединения в сеть
AB Электроника кузова на разъеме CAN, например системы FMS
A-CAN Шина данных CAN кузова (одновременное подключение для интерфейса FMS)
I-CAN Шина данных CAN приборной панели
K-CAN Шина данных CAN системы комфорта (только при наличии КИПиА Highline)
M-CAN Шина данных CAN управления двигателем
T-CAN Шина данных CAN трансмиссии
Электронная тормозная система (EBS)
Функция
EBS (электронная тормозная система) помогает водителю лучше управлять автомобилем в сложных условиях вождения, например в плохую погоду, на скользкой дороге, при движении под уклон, в узких поворотах или при внезапном появлении препятствий.
EBS управляет подачей сжатого воздуха в тормозные цилиндры тормозного устройства посредством электромагнитных клапанов модуля регулировки давления. Блок управления EBS координирует сигналы рабочего тормозного клапана и модулей регулировки давления. Электрические сигналы тормозного давления передаются дальше по шине данных CAN на все модули регулировки давления. Блок управления EBS (A402) выполняет непосредственно настройку электромагнитных клапанов модуля управления прицепом (Y278).
Приложение и снятие тормозного усилия с электронным регулированием обеспечивает быстрое и одновременное торможение на всех мостах, а также быстрое освобождение тормозов. Таким образом, это оптимизирует срабатывание тормозов на всех колесах, а с другой стороны, гарантирует равномерный износ тормозных накладок и увеличивает срок службы на 20%.
При отказе электронной системы регулировки тормозного давления выполняется автоматическое торможение автомобиля посредством пневматического контура управления (резервного контура).
Блок управления EBS координирует все вышеперечисленные функции, например управление тормозами с помощью ABS, ASR и ESP.
В пространственном отношении расположенные рядом компоненты (датчики, клапаны, электроника) объединяются в модуль регулировки давления.
Основная концепция электропневматической системы
Основой системы EBS является обычная двухконтурная рабочая тормозная система. К базовой тормозной системе подключена электронная тормозная система, на которую поступает электропитание от бортовой электрической сети.
Если отсутствуют активные функции EBS, то рабочая система находится в надежном состоянии "торможения пневматического резервного контура". Такое состояние допускается также и при возникновении сбоя функций EBS.
Резервирование одноконтурной электроники
Вычислительный центр (в блоке управления) содержит два избыточных упорядоченных микроконтроллера (µC). После включения зажигания следует самопроверка устройства управления. Два микроконтроллера управляют каждым модулем регулировки давления по отдельности, на каждый подается электропитание и устанавливается связь по шине данных CAN. Из последовательности операций подключения блок управления определяет место установки модулей регулировки давления в системе EBS, и таким образом осуществляется управление и отключение модулей регулировки давления. Соединение на массу модулей регулировки давления от электропитания (клемма 30, 31) установлено в блоке управления с целью контроля и резервирования управления сигнальными лампами.
Блок-схема

1 Блок управления
2 Тормозной датчик
3 Другие сигналы, датчики
4 Выключатель зажигания (клемма 15)
5 Главный выключатель аккумуляторной батареи
6 Электропитание (клемма 30)
7 Генератор
8 Подключение на массу (клемма 31)
9 Подключение на массу блока управления (клемма 31)
10 Подключение на массу модуля регулировки давления (клемма 31)
11 Нагрузочное реле
12 Модуль регулировки давления переднего моста слева
13 Модуль регулировки давления переднего моста справа
14 Модуль регулировки давления заднего моста
15 Модуль управления прицепом
16 Датчики ESP
Тормозной датчик отправляет избыточный электрический сигнал в блок управления EBS. Электрическое торможение выполняется только в том случае, если срабатывают оба сигнала.
В устройстве управления EBS входные сигналы тормозного датчика и от других компонентов обрабатываются обоими микроконтроллерами, и результаты обработки сравниваются. При положительном результате сравнения один из микроконтроллеров по шине данных CAN отправляет сообщение об отдельно отрегулированном тормозном давлении на каждый модуль или два модуля регулировки давления. Обратные сообщения шины данных CAN принимаются одним микроконтроллером и проверяются в обоих микроконтроллерах.
Принцип выбора давления в модуле регулировки давления
С каждым модулем регулировки давления интегрирован независимый контур регулировки давления.
Каждый модуль регулировки давления состоит из 4 блоков:
- узел электронного блока управления с микроконтроллером
- электромагнитные клапаны
- ускорительный клапан
- и датчик давления для измерения регулируемого фактического давления.
Как правило, при торможении на модуле регулировки давления определяется соответствующее номинальное значение CAN и пневматическое тормозное давление. Давление, регулируемое электрическим способом, поступает на тормозные цилиндры. При выключении электрического оборудования системы к тормозному цилиндру направляется пневматическое давление.
В общих чертах выбор при имеющемся запасе сжатого воздуха можно описать следующим образом:
- Давление в тормозном цилиндре регулируется в соответствии с электрическим заданным значением, и если на модуль регулировки давления подается электропитание и заданное значение CAN > 0, то протекание сжатого воздуха для торможения блокируется.
- Давление в тормозной цилиндр поступает из резервного контура при недостаточной подаче электропитания, или же заданное значение CAN равно 0 или отсутствует.
Связь с EBS по шине данных CAN
Датчики, которые измеряют частоту вращения и износ тормозных накладок на колесах заднего моста, соединены непосредственно с модулями регулировки давления. Вся информация перерабатывается и используется электронной системой, которая интегрирована с модулем регулировки давления. Модуль регулировки давления обменивается данными по шине данных CAN тормоза с устройством управления EBS.
Приоритетные функции датчиков, такие как нагрузка на мосты, которые записаны в устройстве управления, используются для всех контуров регулировки тормозного давления, а также для других систем, например пневматической подвески с электронным управлением. Как только рабочий тормозной клапан приведен в действие, электрический и пневматический сигналы готовы к использованию. Если клапаны обесточены, то действуют пневматические сигналы управления через резервный контур. При этом весь модуль регулировки давления механически защищен в безопасной рабочей позиции.
Электронный блок управления (A402)
Блок управления EBS координирует системы EBS и ESP и обменивается данными с другими системами, такими, как система впрыскивания дизельного топлива с электронным управлением (EDC) или система управления коробкой передач.
Электропитание
При подаче напряжения питания фильтр в типовом блоке "Электропитание" защищает от электрических нарушений на клемме 15 и клемме 30. Затем напряжение питания подается на модули регулировки давления, а 5 вольт подаются на датчики. Типовой блок подает, кроме того, стабилизированное напряжение в 5 В для внутреннего использования устройством управления.
Компьютер
Расчетный блок (в блоке управления) содержит два избыточных упорядоченных микроконтроллера (µC) с ЭСППЗУ и два контроллера CAN (CAN трансмиссии, CAN тормозов). Микроконтроллеры используют сигналы, обработанные входными цепями, и управляют выдачей сигналов через шину данных CAN.
Электропитание модулей регулировки давления
При подаче питания на модули регулировки давления каждый модуль после включения устройства управления EBS один за другим подключается через микроконтроллер (µC) и снабжается адресом CAN. Модули регулировки давления отключаются по отдельности, например после обнаруженных неисправностей в системе.
Интерфейсы CAN
- CAN трансмиссии: обмен данными с другими блоками управления.
- CAN прицепа: обмен данными с прицепом посредством электрического соединения, соответствующего DIN ISO 7638.
- CAN тормозов: обмен данными между блоком управления EBS и модулями регулировки давления в тягаче и прицепе.
- CAN датчиков: обмен данными между блоком управления EBS и датчиками ESP.
Конечные ступени
Конечные ступени управляют такими узлами, как отключение тормоза-замедлителя, индикация износа тормозных накладок, желтая лампочка контроля ABS. Красная сигнальная лампа управляется отдельной конечной ступенью.
Штекерная разводка контактов – блок управления
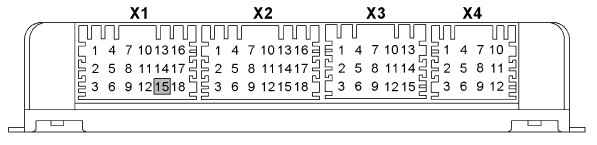
Штекер Х1
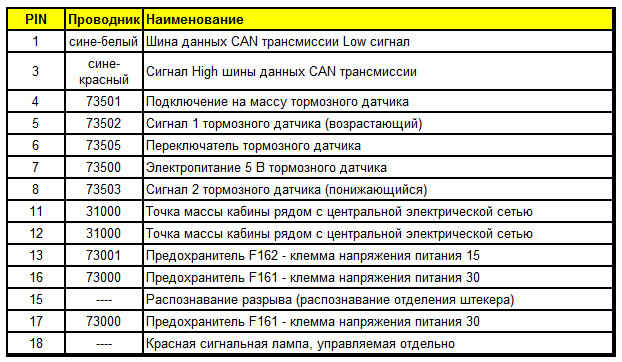
Распознание выпадения штекера:
Выключатель (Pin X1/15), интегрированный с штекером кабельного жгута, включает красную контрольную лампочку замыканием контактов X1/12 и X1/18 со стороны кабельного жгута, если кабельный жгут не присоединен или выпало штекерное соединение. Если кабельный жгут соединен с устройством управления, то выключатель снова размыкается.
Штекер Х2

Штекер X3
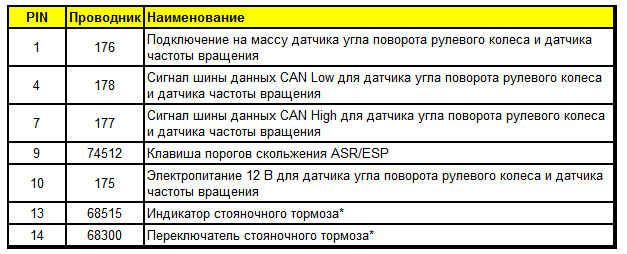
* требуется подключение в зависимости от программного обеспечения
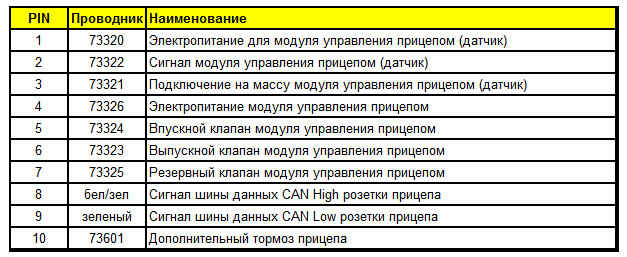
Штекер X4
Рабочий тормозной клапан с интегрированным тормозным датчиком (B337)
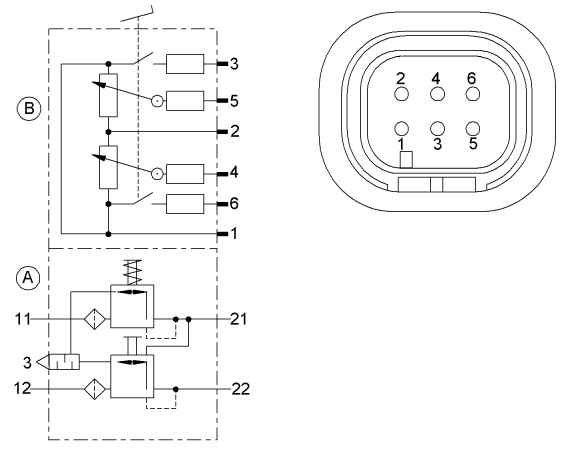
A Рабочий тормозной клапан
B Тормозной датчик
3 Выпуск воздуха
1 Заземление на массу
11 Подача энергии, контур 1
2 Электропитание 5 В
12 Подача энергии, контур 2
3 переключатель
21 Отвод энергии, тормозной контур 1
4 Номинальное значение давления 2 (падающее)
22 Отвод энергии, тормозной контур 2
5 Номинальное значение давления 1 (возрастающее)
6 не занят
B Тормозной датчик
3 Выпуск воздуха
1 Заземление на массу
11 Подача энергии, контур 1
2 Электропитание 5 В
12 Подача энергии, контур 2
3 переключатель
21 Отвод энергии, тормозной контур 1
4 Номинальное значение давления 2 (падающее)
22 Отвод энергии, тормозной контур 2
5 Номинальное значение давления 1 (возрастающее)
6 не занят
Тормозной датчик электрически подключен к устройству управления EBS. Сигналы номинального значения давления 1 и номинального значения давления 2 обоих потенциометров противоположны один другому.
Из номинального значения давления 1 и номинального значения давления 2 в устройстве управления EBS определяются номинальные значения для модулей регулировки давления.
Согласование между электрическим и пневматическим контуром выполняется в автомобиле посредством программирования EOL.
Сигналы датчика тормозного значения
Входящие сигналы тормозного датчика обрабатываются и проверяются. Номинальные значения давления 1 и 2 вместе с характеристикой давления рабочего тормозного клапана, записанной в ЭСППЗУ (электрически стираемой и перезаписываемой энергонезависимой памяти) дают номинальное значение. Оно корректируется в соответствии с предписаниями EOL и передается шине данных CAN тормоза.
Если электрический сигнал о тормозном значении отсутствует, то тормозная система активируется через пневматический резервный контур. Это контур с редукцией давления.
Указание
Согласование может при программировании EOL выполняться автоматически посредством торможения с помощью резервного контура или посредством ручного ввода параметров EOL. Следите, чтобы напряжение тормозного датчика соответствовало тормозному давлению на выходе модуля регулировки давления. Редукционные клапаны в пневматическом резервном контуре влияют на результат.
Контроль
Итоговое противодействующее напряжение (заданное значение давления 1, заданное значение давления 2) контролируется устройством управления EBS. Разные защитные резисторы определяют наличие короткого замыкания в сигнальных проводах в процессе торможения.
1-канальный модуль регулировки давления (Y262/Y263
A Датчик тормозной накладки переднего моста (B332, B333)
Pin 3 CAN-High
Pin 1 Подключение на массу датчика B
Pin 4 CAN-Low
Pin 2 Сигнал от датчика B
1 Электромагнитный клапан резервного контура (резервный клапан)
Pin 3 Электропитание датчика B
2 Впускной клапан
Pin 4 Подключение на массу датчика A
3 Выпускной клапан
Pin 5 Электропитание датчика A
4 Ускорительный клапан
Pin 6 Сигнал от датчика A
5 Датчик давления
B Датчик частоты вращения
6 Резервный контур (резервный клапан)
C Датчик частоты вращения
7 Подача энергии (запас)
D Шина данных CAN и напряжение питания
8 Выпуск воздуха
Pin 1 Заземление на массу
9 Отвод энергии (тормозной цилиндр)
Pin 2 Электропитание
Pin 3 CAN-High
Pin 1 Подключение на массу датчика B
Pin 4 CAN-Low
Pin 2 Сигнал от датчика B
1 Электромагнитный клапан резервного контура (резервный клапан)
Pin 3 Электропитание датчика B
2 Впускной клапан
Pin 4 Подключение на массу датчика A
3 Выпускной клапан
Pin 5 Электропитание датчика A
4 Ускорительный клапан
Pin 6 Сигнал от датчика A
5 Датчик давления
B Датчик частоты вращения
6 Резервный контур (резервный клапан)
C Датчик частоты вращения
7 Подача энергии (запас)
D Шина данных CAN и напряжение питания
8 Выпуск воздуха
Pin 1 Заземление на массу
9 Отвод энергии (тормозной цилиндр)
Pin 2 Электропитание
1-канальный модуль регулировки давления представляет собой 1-канальный электропневматический регулятор.
На датчик износа тормозных накладок во время каждого торможения подается электропитание от модуля регулировки давления, который также измеряет сигнал датчика.
Сигналы, поступающие в модуль регулировки давления от датчика частоты вращения и датчика износа тормозных накладок, передаются дальше через шину данных CAN "Тормоз" в устройство управления EBS.
Модуль регулировки давления выполняет функции управления и регулировки в трех различных состояниях:
- Нормальное функционирование:
На модуль регулировки давления подается электропитание, и имеется номинальное электрическое значение, или же требуется регулировка торможения системой ASR. При запрошенной функции EBS модуль регулировки давления начинает регулирование тормозного давления посредством закрытия электромагнитного клапана резервного контура (резервного клапана) (3) и соответствующую настройку впускного клапана (2) и выпускного клапана (1).
- Торможение с помощью резервного контура:
На модуль регулировки давления поступает электропитание, однако отсутствует электрическое номинальное или фактическое значение. При ошибочном электрическом номинальном или фактическом значении система переключает модуль регулировки давления на резервный контур (резервный клапан не включен и открыт). Пневматическое давление регулирует через ускорительный клапан (4) давление, подаваемое в тормозные цилиндры. Сигналы датчика частоты вращения обрабатываются в модуле регулировки давления, и поддерживается связь между модулем регулировки давления и электронным устройством управления EBS.
- Модуль регулировки давления обесточен:
Электромагнитные клапаны обесточены. Давление сжатого воздуха в рабочем тормозном клапане регулирует через ускорительный клапан давление, подаваемое в тормозные цилиндры, торможение выполняется посредством резервного контура.
Кривая тормозного давления
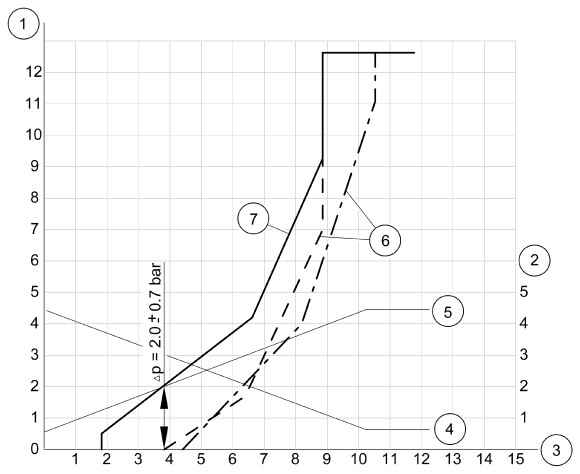
----------- При исправном контуре 1 и при отказе контура 2
-- -- -- -- -- Контур 2 исправен
-- - -- - -- Контур 2 при отказе контура 1
1 Давление P (бар) на разъеме 21 и 22 (при резервном давлении 12,5 бар)
2 Напряжение Ua (Вольт)
3 Ход штока S (мм)
4 Напряжение Ua2, уменьшающийся сигнал тормозного датчика (B337)
5 Напряжение Ua1, увеличивающийся сигнал тормозного датчика (B337)
6 P 22, Тормозное давление контура 2 заднего моста
7 P 21, Тормозное давление контура 1 переднего моста
Модуль регулировки давления 2-канальный (Y264)
A Датчик тормозной накладки, ведущий мост
Pin 3 Электропитание 5 В датчика D
Pin 1 Подключение на массу датчика B
Pin 4 Подключение на массу датчика C
Pin 2 Сигнал от датчика B
Pin 5 Электропитание 5 В датчика C
Pin 3 Электропитание 5 В датчика B
Pin 6 Сигнал от датчика C
Pin 4 Подключение на массу датчика A
F не занят
Pin 5 Электропитание 5 В датчика A
G Датчик частоты вращения ведущего моста
Pin 6 Сигнал от датчика A
H не занят
B Датчик частоты вращения ведущего моста
1 Выпускной клапан
C не занят
2 Впускной клапан
D Шина данных CAN и напряжение питания
3 Резерв (Резервный клапан)
Pin 1 Заземление на массу
4 Ускорительный клапан
Pin 2 Электропитание 24 В
5 Датчик давления
Pin 3 CAN-High
6 Отвод энергии (тормозной цилиндр)
Pin 4 CAN-Low
7 Выпуск воздуха
E Датчик тормозной накладки, ведущий мост
8 Резервный контур (резервный клапан)
Pin 1 Подключение на массу датчика D
9 Подача энергии (запас)
Pin 2 Сигнал от датчика D
Pin 3 Электропитание 5 В датчика D
Pin 1 Подключение на массу датчика B
Pin 4 Подключение на массу датчика C
Pin 2 Сигнал от датчика B
Pin 5 Электропитание 5 В датчика C
Pin 3 Электропитание 5 В датчика B
Pin 6 Сигнал от датчика C
Pin 4 Подключение на массу датчика A
F не занят
Pin 5 Электропитание 5 В датчика A
G Датчик частоты вращения ведущего моста
Pin 6 Сигнал от датчика A
H не занят
B Датчик частоты вращения ведущего моста
1 Выпускной клапан
C не занят
2 Впускной клапан
D Шина данных CAN и напряжение питания
3 Резерв (Резервный клапан)
Pin 1 Заземление на массу
4 Ускорительный клапан
Pin 2 Электропитание 24 В
5 Датчик давления
Pin 3 CAN-High
6 Отвод энергии (тормозной цилиндр)
Pin 4 CAN-Low
7 Выпуск воздуха
E Датчик тормозной накладки, ведущий мост
8 Резервный контур (резервный клапан)
Pin 1 Подключение на массу датчика D
9 Подача энергии (запас)
Pin 2 Сигнал от датчика D
2-канальный модуль регулировки давления представляет собой 2-канальный электропневматический регулятор.
На датчик износа тормозных накладок подается напряжение питания от модуля регулировки давления, который также измеряет сигнал датчика.
Сигналы, поступающие в модуль регулировки давления от датчика частоты вращения и датчика износа тормозных накладок, передаются дальше через шину данных CAN "Тормоз" в устройство управления EBS.
Модуль регулировки давления выполняет функции управления и регулировки в трех различных состояниях:
- Нормальное функционирование:
На модуль регулировки давления подается электропитание, и имеется номинальное электрическое значение, или же требуется регулировка торможения системой ASR. При запрошенной функции EBS модуль регулировки давления начинает с регулировки тормозного давления посредством закрытия электромагнитного клапана резервного контура (резервного клапана) (3) и соответствующей настройки впускного клапана (2) и выпускного клапана (1).
- Торможение с помощью резервного контура:
На модуль регулировки давления поступает электропитание, однако отсутствует электрическое номинальное или фактическое значение. При ошибочном электрическом номинальном или фактическом значении система переключает модуль регулировки давления на резервный контур (резервный клапан не включен). Пневматическое давление регулирует через ускорительный клапан (4) давление, подаваемое в тормозные цилиндры, при этом не предпринимается автоматическое, зависящее от нагрузки регулирование тормозного усилия и регулирование износа. Сигналы датчика частоты вращения обрабатываются в модуле регулировки давления, и поддерживается связь между модулем регулировки давления и электронным блоком управления EBS.
- Модуль регулировки давления обесточен:
Электромагнитные клапаны обесточены. Давление сжатого воздуха в рабочем тормозном клапане регулирует через ускорительный клапан давление, подаваемое в тормозные цилиндры, торможение выполняется посредством резервного контура.
Модуль управления прицепом (Y278)
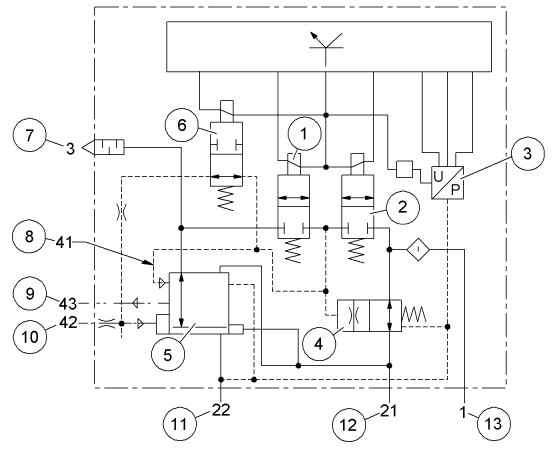
1 Выпускной клапан
2 Впускной клапан
3 Датчик давления
4 Дроссель
5 Ускорительный клапан
6 Резервный электромагнитный клапан
7 Выпуск воздуха
8 Электрическая камера управления, внутренний тормозной контур
9 Контур стояночного тормоза
10 Контур рабочего тормоза заднего моста
11 Тормозной пневмопровод прицепа
12 Резервный трубопровод прицепа
13 Подача энергии (запас)
Штекерная разводка контактов

Pin 1 Впускной клапан
Pin 2 Электропитание
Pin 3 Резервный клапан
Pin 4 Датчик базового давления
Pin 5 Подключение на массу датчика давления
Pin 6 Сигнал датчика давления
Pin 7 Выпускной клапан
Основной функцией модуля управления прицепом является регулирование тормозного давления в трубопроводе тормозного привода прицепа (разъем 22, поз. 11). Стояночная тормозная система (разъем 43, поз. 9) и функция разрыва работают обычным образом.
Номинальное значение давления устройства управления EBS передается через шину данных CAN "Прицеп" к модулю управления прицепом, интегрированным с устройством управления.
При закрытом резервном электромагнитном клапане (6) этот электрический сигнал вместе с электромагнитным впускным клапаном (2) и выпускным клапаном (1), а также с датчиком давления (3) настраивает на выходе 22 (11) давление сжатого воздуха, которое передается соединительной головке тормозного привода прицепа.
Пневматический сигнал контура рабочего тормоза 41 (8) блокируется резервным электромагнитным клапаном (6), который активируется для электрического торможения. Если функция резервирования не активна, то резервный электромагнитный клапан (6) открыт, и рабочее тормозное давление на разъеме 41 (8) регулирует далее через камеру управления (5) ускорительного клапана тормозное давление на разъеме 22 соединительной головки тормозного привода.
Давление, имеющееся в контуре рабочего тормоза 42 (10) модуля управления прицепом, обслуживает отдельную камеру управления ускорительного клапана. Давление начала срабатывания этого узла ускорительного клапана составляет прим. 2,5 бар. При активном модуле управления прицепом и давлении в контуре рабочего тормоза 42 (10) модуля управления прицепом прим. 8 бар тормозное давление на разъеме 22 (11), электрически отрегулированное резервным электромагнитным клапаном, входным и выходным клапанами, может быть уменьшено примерно на 1 бар. При дальнейшем уменьшении электрически отрегулированного давления величина давления в контуре рабочего тормоза 42 (10) модуля управления прицепом определяет тормозное давление на разъеме 22 (11).
В случае отказа электронной тормозной системы и контура рабочего тормоза 41 (8) автоматически изменяется пневматическая характеристика для контура рабочего тормоза 42 (10). Давление начала срабатывания остается равным прим. 2,5 бар, независимо от давления резерва. При тормозном давлении 8 бар в контуре рабочего тормоза 42 (10) в трубопроводе тормозного привода прицепа 22 (11) также имеется давление примерно 8 бар.
При расторможенной стояночной тормозной системе контур стояночного тормоза 43 (9) находится под давлением таким образом, что цилиндры рабочего тормоза прицепа не приведены в действие. Активирование стояночного тормоза снижает давление в контуре стояночного тормоза. Это приводит к повышению давления в пневмопроводе тормозного привода прицепа 22 (11) и к приведению в действие рабочего тормоза прицепа.
В случае отключения разъема пневмопровода тормозного привода прицепа 22 (11) при торможении ограничивается с помощью автоматически перекрываемого дросселя (4) подача давления к разъему резервного трубопровода прицепа 21 (12). Давление подачи сжатого воздуха при этом снижается в пределах 2 с до величины менее 1,5, в результате прицеп тормозится.
Датчик износа тормозных накладок (B332, B333, B334, B335, B529, B530, B537, B538)
В качестве датчиков износа тормозных накладок в дисковых тормозах используются датчики с подпружиненными штифтами. На датчик износа тормозных накладок напряжение подается только во время торможения. В этом случае от датчика износа тормозных накладок поступает напряжение, зависящее от износа и регулировки, на модуль регулировки давления.
В конце электрического торможения это напряжение измеряется. Значение этого напряжения по шине данных CAN "Тормоз" передается для оценки в устройство управления EBS. В зависимости от используемого принципа измерения это значение может зависеть от износа тормозных дисков.
- Блок управления EBS не может различать износ тормозных накладок и дисков.
Если превышено допустимое значение тормозной накладки, то блок управления EBS контролирует тормозную систему, и на дисплее появляется сообщение о неисправности ""Износ тормозных накладок"
- Регулировка износа тормозных накладок
Система регулировки износа тормозных накладок рассчитывает для каждого моста корректирующее значение для тормозного усилия при выполнении предписания о поддержке постоянной суммы тормозных усилий, с тем чтобы обеспечить оптимизацию износа тормозных накладок и увеличение срока их службы. При этом не выполняется регулировка для каждого колеса отдельно.
Датчики частоты вращения (B119, B120, B121, B122, B591, B592)
Механизм датчиков частоты вращения состоит из явнополюсного ротора и индуктивного датчика частоты вращения. Индуктор монтируется в соответствии с известным положением ABS.
При вращающемся колесе в датчике скорости вращения вырабатывается переменное напряжение, частота которого пропорциональна скорости колеса.
Датчик частоты вращения электрически соединен с модулем регулировки давления. Расположение датчиков частоты вращения по отношению к колесам при подключении к модулю регулировки давления может быть запрограммировано с помощью EOL.
- Контроль
Контроль датчиков частоты вращения выполняется с помощью модуля регулировки давления. Время, которое проходит до определения программным обеспечением короткого замыкания между разъемами датчика частоты вращения, зависит от скорости автомобиля.
- Вычисление скорости
Сигналы датчиков частоты вращения заднего моста обрабатываются в модуле регулировки давления таким образом, что через шину данных CAN "Тормоз" в устройство управления EBS поступает уже сигнал скорости. Из всех контролируемых колес и сообщенных сигналов состояния модуля для регулировки давления после учета различающегося диаметра шин и критериев пробуксовки рассчитывается скорость автомобиля, которая передается на шину данных CAN "Тормоз".
Список этапов проверки
Описание проверок
С помощью списка этапов проверки могут быть проверены компоненты или функции EBS/ESP, при этом используется мультиметр (например, FLUKE 77 или 87).
В приведенном в данной главе списке этапов проверки (пример: Шаг 1) первый контрольный контакт обозначается "Pin X1/12", а второй – "Pin X1644 (точка массы кабины рядом с центральной электрической сетью)". С помощью мультиметра определяется значение сопротивления между этими двумя Pin. Измеряется непосредственно на блоке управления EBS. Между контрольными контактами (Pin), указанными в столбце 3, находится настраиваемый на измерительном приборе (мультиметре) вид измерения.
Пример: Настройка "V" = измерение напряжения
Пример: Настройка "Ω" = измерение сопротивленияЕсли условия для проверок выполнены, могут быть сравнены значения измерительного прибора (и/или фактическая характеристика) с заданным значением (и/или заданная характеристика).
Далее представлены примеры измерений.

Если измеряются значения напряжения, необходимо включить зажигание и оставить подсоединенными штекеры блока управления EBS.
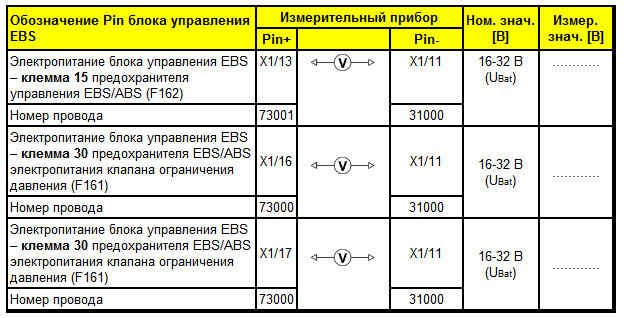
В этом примере измеряется электропитание устройства управления между положительным проводом Pin X1/16 и проводом заземления Pin X1/11. Измеренное с помощью мультиметра FLUKE 77 значение составляет 23,92 В (напряжение аккумуляторной батареи).

Если измеряются значения сопротивления, необходимо выключить зажигание и отсоединить штекер, на котором определяется значение сопротивления.
В этом примере проводится замер сопротивления на шине данных CAN трансмиссии между Pin Х1/1 – сигнал High шины данных CAN трансмиссии и Pin X1/3 – сигнал Low шины данных CAN трансмиссии.
Значение, измеренное с помощью мультиметра FLUKE 77, составляет 60,2 Ом.
Записанные активные неисправности должны быть локализованы с помощью списка этапов проверки.
- При поиске ошибок используйте специальные общие схемы или схемы электрических соединений, предназначенные для данного типа автомобиля.
- При измерении напряжения зажигание включается при работающем двигателе и стоящем автомобиле.
- При измерении сопротивления зажигание выключается.
- Напряжение и сопротивление измеряют мультиметром (например, FLUKE 77 или 87) на выводах + (Pin+) и - (Pin-).
Категорически запрещается проводить замеры на штекерных контактах без соответствующих пробников! Опасность увеличения контактного соединения!
Измерение сопротивления
- Выключите зажигание
- Штекер, на котором производится измерение, необходимо отсоединить от блока управления.
Масса электропитания блока управления

Кнопка повышения порога пробуксовки ASR (S256)

Розетка прицепа ABS (X317)
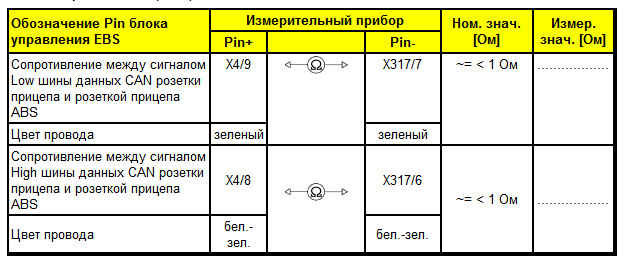
Шина данных CAN
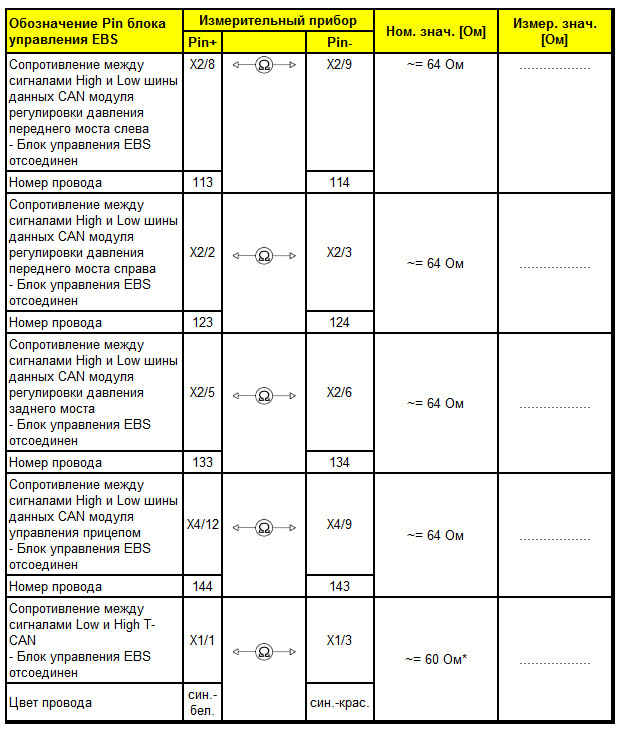
* Примечание. В блоке управления EBS не предусмотрено нагрузочного резистора 120 Ом.
Датчик частоты вращения переднего моста слева (B119)

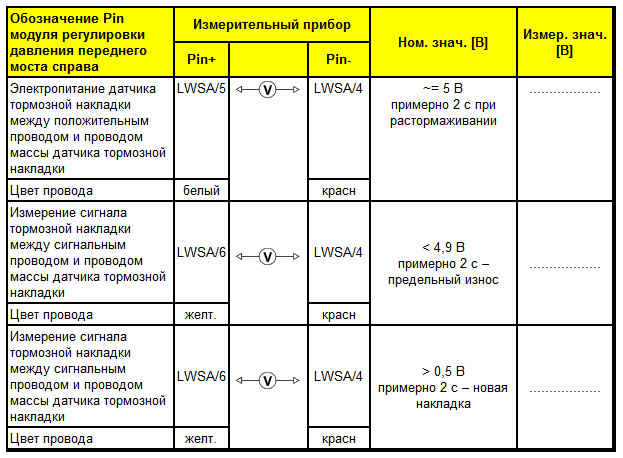
Датчик частоты вращения переднего моста справа (B120)

Датчик частоты вращения ведущего моста слева (B121)

Датчик частоты вращения ведущего моста справа (B122)

Датчик частоты вращения 2-го переднего моста слева (B591)

Датчик частоты вращения 2-го переднего моста справа (B592)
Измерение напряжения
- Зажигание "ВКЛ"
- Измерение выполняется непосредственно на измеряемых компонентах (блок управления EBS, модули регулировки давления переднего моста слева и справа, а также заднего моста).
Рабочее напряжение находится в зависимости от состояния аккумуляторной батареи между 20 В и 28 В.
Электропитание
Тормозной датчик EBS (B337)
Датчик тормозной накладки переднего моста слева (B333)
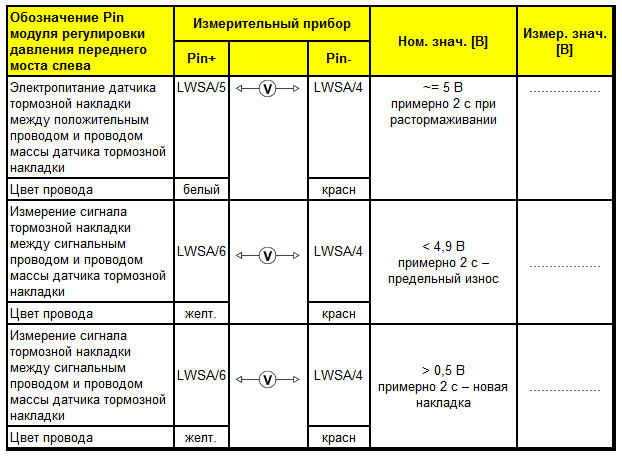
Датчик тормозной накладки переднего моста справа (B332)
Датчик тормозной накладки ведущего моста слева (B335)
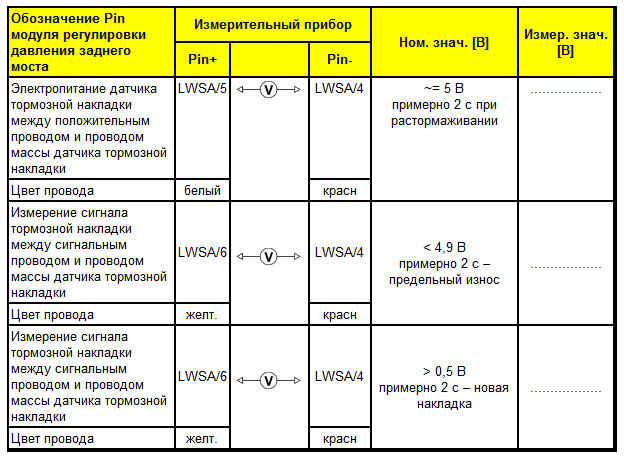
Датчик тормозной накладки ведущего моста справа (B334)
Датчик тормозной накладки 2-го переднего моста слева (B537)

Датчик тормозной накладки 2-го переднего моста справа (B538)
Датчик тормозной накладки дополнительного моста слева (B530)
Датчик тормозной накладки дополнительного моста справа (B529)
Модуль регулировки давления переднего моста слева (Y263)
Модуль регулировки давления переднего моста справа (Y262)
Модуль регулировки давления заднего моста (Y264)
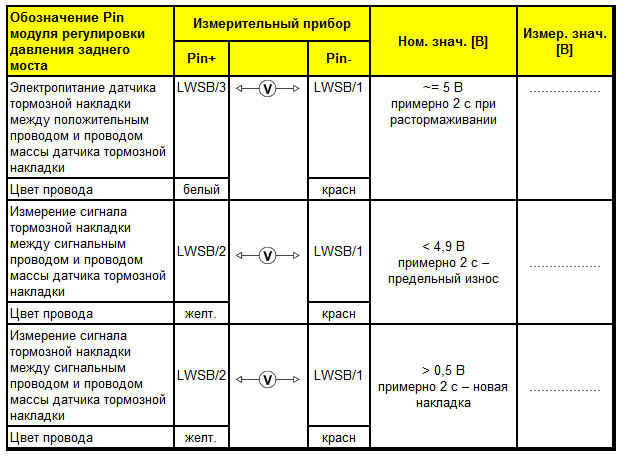
Модуль управления прицепом (Y278)
Измерение напряжения шины данных CAN
* Проверьте осциллоскопом или Scopemeter 123 FLUKE.
Выше на иллюстрации представлена форма сигнала в шине данных "трансмиссии High" (канал A) и в шине данных "трансмиссии Low" (канал В) сети CAN.
Электропитание ESP
Шина данных CAN: измерение сопротивления ESP
Шина данных CAN: измерение напряжения ESP
* Проверьте осциллоскопом или Scopemeter 123 FLUKE
На иллюстрации представлены характеристики сигнала High (канал А) и сигнала Low (канал В) шины данных CAN тормозной системы.
Стирание регистратора неисправностей
Если проведены все тесты и неисправностей не обнаружено, в регистраторе неисправностей не должны находиться активные сообщения о неисправностях!
После повторного включения зажигания удалите из регистратора неисправностей сообщения о неполадках, в противном случае необходимо найти и устранить неисправность.