

См. также:
Система Vario Compact ABS -VCS II WABCO
(антиблокировочная система 2го поколения для прицепной техники)
В начале 80тых годов, когда коммерческие транспортные средства впервые начали оборудоваться
серийно выпускаемой антиблокировочной системой (Anti-Lock Brake System - ABS), ее производителем
являлась компания WABCO. Вскоре после начала серийной установки ABS на автомобилях, последовала ее серийная установка на прицепах. Благодаря универсальности системы и ее диагностики, VARIO B, а затем и начавшая выпускаться в 1989 году система VARIO C обеспечили потребителям новые возможности. Производители прицепной техники предъявляли чрезвычайно высокие требования к
простоте монтажа и диагностики ABS. Это явилось основной причиной, по которой компания WABCO
разработала в 1993 году следующее поколение антиблокировочной системы - названное VARIO
Compact ABS - VCS. Серийное производство этой системы началось в 1995 году. Благодаря своей
гибкости, надежности и высокому качеству эта система быстро заняла лидирующие позиции на
рынке.
Более 1 миллиона систем выпущенных на сегодняшний день сделали систему VCS одним из наиболее
успешных видов продукции компании WABCO среди широчайшей гаммы выпускаемого прицепного
оборудования. Для того, чтобы удержать и расширить достигнутые позиции, во время постоянно растущего уровня автоматизации, компания WABCO разработала систему VARIO Compact ABS 2го Поколения (VCS II). Как и ранее, в основу системы VCS II заложен модульный (блочный) принцип, базирующийся на технологии экстремально прочной антиблокировочной системы TCS II производимой для Североамериканского автомобильного рынка NAFTA. Более того, в новую систему были интегрированы интерфейс ISO 11992 и принцип подключения внешних компонентов посредством 8ми-контактных разъемов, применяемых в электронной тормозной системе прицепов TEBS.
Благодаря этому, разработка VCS II привела к появлению более мощной, в сравнение с ее предыдущей моделью, антиблокировочной системы, имеющей меньшие габаритные и установочные размеры, а так же значительно меньший вес.

Введение
Обзор системы
VCS II является системой ABS предназначенной для прицепной техники, готовой для непосредственного
монтажа. Она отвечает всем законодательным предписаниям, предъявляемым к системам категории А. Количество модификаций системы наращивается от ABS 2S/2M (где S sensor/датчик, M modulator/модулятор) разработанной для полуприцепов, до ABS 4S/3M, используемой на дышловых прицепах или полуприцепах с поворотной осью.
Согласно специфическим требованиям, определяемым производителями транспортных средств, VCS II
выпускается как в виде единого компактного узла (электронный блок объединен с двумя модуляторами), так и в виде отдельных блоков (т.е., электронный блок управления и модуляторы могут быть установлены раздельно).
Вариант Standard 400 500 070 0:
Электропитание по ISO 7638
Дополнительное 24В электропитание (24N)
Два входа датчиков скорости
Максимальная конфигурация: 2S/2M
Функционально программируемые универсальные выводы D1 и D2 (Generic IO)

Вариант Premium 400 500 081 0:
Электропитание по ISO 7638
Дополнительное 24В электропитание (24N)
Четыре входа датчиков скорости
Максимальная конфигурация: 4S/3M (с внешним им модулятором ускорительным клапаном ABS)
Интерфейс ISO 11992 (CAN)
Функционально программируемые универсальные выводы D1, D2 и A1 (Generic IO)
вывод для зарядки аккумуляторной батареи прицепа

Вариант Separate 446 108 085 0:
(электронный блок отделен от модуляторов)
Электропитание по ISO 7638
Четыре входа датчиков скорости
Максимальная конфигурация: 4S/3M
Внешние модуляторы ускорительные клапаны ABS или обычные автомобильные модуляторы
Интерфейс ISO 11992 (CAN)
Функционально программируемый универсальный вывод D1 (Generic IO)

Описание системы и ее функций
Конструкция ABS
Система Vario Compact ABS (VCS) пригодна для прицепов и полуприцепов любого назначения, имеющих пневматическую тормозную систему.
Конфигурации системы ABS варьируются от 2S/2M до 4S/3M. ABS является дополнением к традиционной тормозной системе и состоит из следующих основных элементов:
два или четыре индуктивных датчика скорости и зубчатых ротора (для непосредственного замера
скорости вращения колес)
два или три электропневматических модулятора со следующими функциями:
наращивание тормозного давления
поддержание тормозного давления
снижение тормозного давления
один электронный блок управления (Electronic Control Unit - ECU), имеющий два или три канала
управления и функционально подразделенный на следующие контуры:
входной контур
основной контур
контур безопасности
контур управления электроклапанами
Во входном контуре, сигналы, генерируемые соответствующими индуктивными датчиками, фильтруются и преобразуются в цифровую информацию необходимую для определения длительности периода поступающих импульсов.
Основной контур представляет собой микрокомпьютер. Он содержит в себе комплекс программ для
проведения необходимых расчетов и осуществления логических операций с управляющими сигналами, а так же для выдачи результирующих сигналов в контур управления электроклапанами (модуляторами).
Контур безопасности непрерывно проверяет исправность системы ABS, т.е. датчики, модуляторы,
электронный блок управления и электропроводку, как на стоящем, так и на движущемся транспортном
средстве, независимо от того, приведена в действие тормозная система или нет. Контур безопасности
предупреждает водителя об обнаружении любой ошибки или неисправности при помощи контрольной
(аварийной) лампы, а также полностью или частично отключает антиблокировочную систему. Полное или частичное отключение касается лишь ABS, в то время как традиционная тормозная система
остается при этом полностью работоспособной.
Контур управления электроклапанами состоит из мощных силовых транзисторов (выходных ключей),
которые управляются сигналами поступающими из основного контура и подают ток к электроклапанам
(модуляторам). В системе ABS прицепа могут быть использованы как модуляторы, изготовленные на
базе ускорительных клапанов (ускорительные клапаны ABS), так и обычные модуляторы (электромагнитные клапаны ABS). Выбор типа применяемых модуляторов зависит от тормозной системы и в особенности от необходимого времени ее срабатывания. Для выбранного типа модуляторов
должен использоваться и соответствующий электронный блок - ECU. Система ABS не оказывает
никакого влияния на процесс нормального увеличения и сброса тормозного давления, осуществляемые
водителем, если к модуляторам не поданы соответствующие электрические сигналы.
Блочная структура системы
Система ABS Vario Compact представляет собой блочное устройство с системными конфигурациями
2S/2M, 4S/2M и 4S/3M. Это означает, что для каждого из типов транспортных средств существует
подходящий вариант системы. Как минимум, один датчик и один модулятор составляют канал
управления.
В случае конфигурации 2S/2M, каждый датчик и модулятор одной из сторон (одного борта)
полуприцепа интегрирован в канал управления. Все остальные колеса каждого из бортов, если таковые
имеются, управляются косвенно. Тормозные силы контролируются в соответствие с принципом так
называемого Индивидуального Управления (IR = Individual-Regelung). Т.е., каждый борт транспортного средства управляется тормозным давлением, соответствующим состоянию дорожного покрытия и
требуемой интенсивности торможения. Если на многоосном транспортном средстве система ABS
подобной конфигурации управляет колесами, не имеющими датчиков, то принцип управления носит
название Косвенного Индивидуального Управления (INIR = Indirekte Individual Regelung). В некоторых случаях, посредством конфигурации 2S/2M может быть реализовано осевое управление. С учетом этого, для конфигурации 2S/2M, был разработан принцип Диагонального Осевого Управления (DAR = Diagonale Achs-Regelung). В данном случае все тормозные цилиндры одной оси подсоединены к одному модулятору ABS (поосевое управление).
Модулятор первой оси управляется на основе сигнала датчика, установленного в ее правом колесе, а модулятор второй оси от датчика установленного в ее левом колесе (диагональное управление). Таким образом, каждая ось может управляться индивидуальным тормозным давлением.
В случае конфигурации 4S/2M, на каждый из бортов транспортного средства приходится по два датчика.
Сигналы обоих датчиков колес борта используются ECU для управления одним модулятором.
В данном случае управление так же осуществляется по бортам. Тормозное давление при этом, одинаково для всех колес одного борта. Два колеса расположенные с одного борта и имеющие датчики
управляются по принципу Модифицированного Бортового Управления (MSR = Modifizierte Seiten-Regelung). Это означает, что колесо одного из бортов транспортного средства, которое первым
стремится к блокировке, является определяющим для ABS-регулирования. Однако при этом, оба
модулятора управляются индивидуально. Для каждого из бортов транспортного средства используется принцип индивидуального управления. Если на многоосном транспортном средстве система ABS
конфигурации 4S/2M управляет колесами, не имеющими датчиков, то принцип управления носит
название Косвенного Бортового Управления (INSR = Indirekte Seiten-Regelung).
Конфигурация 4S/3M предпочтительна для дышловых прицепов или полуприцепов с поворотной
осью. На поворотной оси при этом установлены два датчика, а управляет ею один модулятор. Этот
дополнительный модулятор, управляющий колесами поворотной оси, обозначается в схемах буквой - А. Управляется при этом целиком вся ось т.к. тормозное давление для всех колес оси одинаково. В этом случае управление осуществляется в соответствие с принципом Модифицированного Осевого Управления (MAR = Modifizierten-Achs-Regelung).
На следующей оси используется по одному датчику и модулятору с каждой стороны ТС для осуществления управления по бортам. Колеса данной оси управляются индивидуально (IR).
Действительно для всех конфигураций:
Дополнительные тормозные цилиндры остальных осей могут быть подсоединены к соответствующим
модуляторам, управляющих тормозными цилиндрами колес, имеющих датчики. Колеса осей управляемых косвенно не передают в ECU никакой информации. Поэтому нельзя гарантировать отсутствие их блокировки.
Самоконфигурация
Для создания максимального удобства пользователю, в ECU заложен программный механизм самоконфигурации. При подаче электропитания, электронный блок автоматически распознает подсоединенные к нему компоненты. В случае отсутствия ошибок, распознанная конфигурация системы принимается и запоминается.
В состоянии поставки, все ECU изначально запрограммированы на конфигурацию 2S/2M!.
Если при запуске системы распознается другая конфигурация (4S/2M или 4S/3M), то она будет
автоматически принята и занесена в память ECU.
Таким образом, нет необходимости в принудительном конфигурировании (так называемом крещении)
при первом, после сборки системы, включении электропитания.
Механизм самоконфигурации работает лишь в случае расширения конфигурации системы (т.е. от 2S/2M к 4S/2M или 4S/3M), но не обратно, во избежание автоматического изменения конфигурации при обрыве электрического соединения или удалении одного из компонентов системы (например, модулятора А). Если такая переконфигурация все же необходима, ее можно произвести при помощи
соответствующего диагностического оборудования.
В версии Standard механизм самоконфигурации отсутствует т.к. в этом варианте возможна лишь
конфигурация 2S/2M.
Описание цикла управления ABS
На приведенном ниже рисунке показан цикл управления ABS и его основные параметры такие как: порог замедления колеса b, порог ускорения колеса +b, а так же низший и высший пороги
проскальзывания колеса λ1 и λ2 соответственно.
В результате повышения тормозного давления колесо начинает непрерывно замедляться. В точке
1 замедление колеса превышает физически реализуемое для транспортного средства (ТС) значение
замедления. Базовая (эталонная) скорость, которая до сего момента соответствовала скорости колеса,
начинает изменяться и снижается в соответствие с заданным для ТС замедлением. Ее максимальное
значение определяется эталонными скоростями колес и в основном используется в качестве общей
базовой скорости. Проскальзывание конкретного

колеса рассчитывается из соответствующей ему скорости, а так же из значения общей базовой скорости. В точке 2 замедление превышает порог b. Колесо попадает в нестабильный диапазон кривой
µ-λ. В этот момент тормозная сила достигла своего максимального значения, поэтому любое дальнейшее увеличение тормозного момента приводит лишь к росту замедления колеса, но не его тормозной силы. Соответственно, тормозное давление быстро понижается, а спустя короткий промежуток времени, после снижения давления, уменьшается и замедление колеса. Существенное влияние на время замедления оказывает гистерезис колесного тормозного механизма и направление кривой µ-λ в ее нестабильном диапазоне. Только после преодоления гистерезиса колесного тормоза, дальнейшее понижение давления оказывает влияние на сокращение замедления колеса. В точке 3 сигнал замедления b перестает быть ниже порогового значения и тормозное давление остается постоянным в течение времени Т1. Обычно, ускорение колеса превышает порог ускорения +b (точка 4) за то время, пока тормозное давление удерживается постоянным. До тех пор, пока порог ускорения остается превышенным, тормозное давление удерживается постоянным. Если за время Т1 сигнал +b не появится (например при низком коэффициенте сцепления между колесом и дорогой) тормозное давление будет продолжать понижаться до появления сигнала проскальзывания λ1. Более высокий порог замедления λ2 в данном цикле управления достигнут не будет. В точке 5, после падения ниже порогового значения, сигнал +b пропадает. Сейчас колесо находится в стабильном диапазоне кривой µ-λ, а используемое значение величины µ (коэффициент сцепления) лежит немного ниже ее максимального значения. Теперь, за определенное время Т2, тормозное давление резко наращивается для того, чтобы преодолеть гистерезис тормоза. Для первого цикла управления время Т2 жестко предопределено, а для каждого последующего цикла будет рассчитано заново. После фазы резкого
наращивания, тормозное давление повышается пульсациями, т.е. попеременным удержанием
тормозного давления и его подачей.
Представленная логика работы не является жесткой и будет корректироваться в соответствии с динамикой поведения колес при различных коэффициентах сцепления, т.е. система работает адаптивно. Пороги замедления и ускорения колеса, вплоть до величины проскальзывания, так же не постоянны и зависят от многих параметров, например от такого параметра, как скорость колеса. Количество циклов управления зависит от динамических свойств всего контура управления; модулятор ABS тормозной механизм колесо поверхность дороги. Коэффициент сцепления при этом, так же имеет существенное значение. Обычно, в течение секунды происходит от 3 до 5 циклов, но на мокром льду их количество уменьшается.
Электропитание
VCS II работает при номинальном напряжении 24В. 12В вариант готовится к производству. Основное
электропитание осуществляется через 5ти либо 7ми контактное соединение, в соответствие со стандартом ISO 7638. WABCO рекомендует использовать данный способ подключения электропитания. Не смотря на это, электронные блоки версий Premium и Standard могут быть дополнительно запитаны как в соответствие со стандартом ISO 1185, так и ISO 12098 (через вывод стоп-сигнала розетки 24N).
Данный тип электропитания может быть выбран в качестве опции.
Если электропитание подано одновременно несколькими способами, электронный блок выберет тот источник питания, напряжение которого будет выше.
В случае прекращения подачи питания от одного из источников, система автоматически переключается
на следующий. После подачи напряжения кратковременно включаются все электромагниты. В подтверждение этого можно услышать легкие щелчки.
Если активирована функция Overshoot (т.е. другая электронная система, например ECAS, получает
электропитание через электронный блок VCS II), то после снятия напряжения с Кл.15, ABS ECU и выход
электропитания остаются активными в течение заданного промежутка времени, чтобы дать возможность подключенной через них системе завершить текущие функции управления.
Модуляторы ABS
VCS II в версиях Standard и Premium имеет сдвоенный ускорительный клапан ABS. Это (двухканальный) модулятор, который во время цикла ABS-регулирования может управлять двумя, практически независимыми тормозными давлениями. Для модулирования давления служат три встроенных электромагнитных клапана, имеющих прямое внутреннее соединение с электронным блоком управления. Нет больше необходимости во внешнем соединительном кабеле, как это было у прежних систем.

Пневматические соединения осуществляются через два питающих порта (чаще всего из двух используется только один), порт управления и шесть тормозных шлангов. В случае конфигурации 4S/3M, в дополнение к двухканальному модулятору система оснащается ускорительным клапаном ABS.

Конфигурация 4S/3M
Обычно, этот ускорительный клапан ABS имеет отдельное пневматическое подключение. В качестве дополнения, планируется вариант VCS II представляющий собой компактное устройство на базе
аппаратов версии Premium в сборе с ускорительным клапаном ABS, предварительно пневматически и
электрически соединенных между собой.
Более того, Vario Compact ABS 2-го поколения в версии Separate, c ECU отделенным от модуляторов,
может управлять двумя или тремя ускорительными клапанами ABS (например, WABCO № 472 195 031 0
или 472 195 041 0). Это может быть необходимо для специальных транспортных средств либо в
специфических для монтажа ситуациях.

Версия Separate
В определенных случаях имеет смысл устанавливать электромагнитные клапаны ABS (например WABCO № 472 195 018 0). Особенно на малых прицепах или прицепах с центральным расположением осей, которые имеют благоприятные для обеспечения необходимого времени срабатывания условия и потому не требуют применения ускорительных клапанов. Электромагнитные клапаны ABS могут использоваться лишь в комбинации с ECU версии Separate.

Управление контрольной лампой
В ECU имеется выход (контакт 7 в разъеме Х1), предназначенный для управления контрольной
лампой ABS прицепа, который позволяет управлять ей в соответствие с ISO 7638. Для того чтобы активировать контрольную лампу, данный выход должен быть соединен с минусом блока ECU в том числе, когда ECU выключен.
Подключение контрольной лампы
Контрольная лампа должна быть подключена в зависимости от выбранного способа подачи электропитания к системе ABS.
В случае организации электропитания в соответствие с ISO 7638 контрольная лампа ABS прицепа, установленная в тягаче должна быть подключена между клеммой 15 и контактом 5 розетки ISO 7638. Этот контакт напрямую соединен с выводом контрольной лампы блока ECU.
В случае организации (вспомогательного) электропитания в соответствии с ISO 1185, либо ISO 12098, на прицепе может быть установлена дополнительная контрольная лампа ABS. Она должна быть подключена между выводом контрольной лампы блока ECU и контактом 4 (питание ламп стоп-сигнала) по ISO 1185 или контактом 7 по ISO 12098. Данная дополнительная внешняя контрольная лампа, устанавливаемая на прицепе, активируется лишь в том случае, если система ABS запитывается через один из описанных выше контактов в процессе торможения. С этого момента поведение данной контрольной лампы идентично поведению контрольной лампы, установленной в тягаче.
Последовательность срабатывания контрольной лампы
В системе VCS II могут быть реализованы две различные последовательности срабатывания контрольной лампы. Ниже приводится описание этих альтернатив, которые можно изменить в любое
время путем установки соответствующих параметров.
Последовательность 1
Первая из возможных и наиболее часто используемая в коммерческих ТС и легковых автомобилях
функция:
После включения зажигания, на неподвижном ТС, контрольная лампа гаснет по истечении примерно 2-
х секунд, при условии, что ECU не обнаружил никаких статических (из тех, что могут быть определены на неподвижном ТС) неисправностей.

Если после включения зажигания будет обнаружена какая-либо неисправность, контрольная лампа не
погаснет.

Если во время последней поездки возникла неисправность датчика скорости ABS, которая обнаруживается только во время движения, то контрольная лампа погаснет лишь после того, как ТС превысит скорость движения примерно 7км/ч, при условии что сигнал от датчика вновь будет в наличии.

Если неисправность обнаружена во время текущей поездки, то контрольная лампа горит постоянно.

Последовательность 2
В случае выбора второго варианта функции, на неподвижном ТС, контрольная лампа зажигается,
затем гаснет и зажигается вновь, при условии, что не обнаружено никаких статических неисправностей.
При превышении скорости примерно 7км/ч лампа гаснет окончательно.

Если же после включения зажигания зафиксирована текущая ошибка, то контрольная лампа не выключается. Данная ситуация идентична случаю в Последовательности 1.
Другие функции контрольной лампы
Если ТС не начнет двигаться в течение часа с момента включения зажигания, то загорится контрольная лампа. Это позволяет избежать ситуации, когда ABS не получив сигнала от датчика скорости, из-за большого зазора между датчиком и ротором (например, после ремонта тормозов), гасит контрольную лампу не определив наличие неисправности. При возникновении подобной ситуации контрольная лампа погаснет сразу же после того, как появится сигналы датчиков скорости. Данный часовой период может быть поделен на несколько малых периодов (например, 4 промежутка по 15 минут).
Слежение за возникновением неисправностей
В процессе работы, ECU постоянно контролируется встроенным контуром безопасности. Если системой
ABS будут обнаружены неисправности, то произойдет либо отключение неисправного компонента
(выборочное отключение), либо полное самоотключение всей системы. Обычная тормозная функция
при этом сохраняется. Тип неисправностей и частота их возникновения надежно запоминаются в
микросхеме памяти EEPROM. Они могут быть считаны при помощи диагностических устройств.
Каналы управления, остающиеся в работе благодаря выборочному отключению, позволяют системе
ABS функционировать частично, что само по себе не является гарантией тормозной эффективности, так
же как и вторичной стабилизации транспортного средства.
Интерфейс Тягач - Прицеп в соответствие с ISO 11992 (CAN)
Электронные блоки управления версий Premium и Separate оборудованы интерфейсом Тягач-Прицеп в
соответствие с ISO 11992. В версии Standard этот интерфейс отсутствует. Данный интерфейс обеспечивает связь между грузовиком и прицепом через контакты 6 и 7 разъемного соединения по ISO 7638.
VCS II поддерживает обмен данными, стандартизованными по ISO 11992, при их доступности и наличии подобного обмена как такового. При активировании интерфейса ECAS, поддерживаются так же и стандартизованные данные пневмоподвески.
Диагностический интерфейс
ECU оборудован диагностическим интерфейсом в соответствие со стандартом ISO 14230. В качестве
диагностического протокола используется стандарт KWP2000 (ISO 14230-2) или JED 677. Данные интерфейсы позволяют осуществлять следующие функции:
Считывать и удалять сохраненную в памяти информацию о типах и частоте появления неисправностей
Производить функциональные тесты
Модифицировать системные параметры
Настраивать функции модуля универсальных выводов GenericIO
В версиях Standard и Premium, подключение диагностического кабеля с К-линией производится к разъему Х6, контакт 8, (метка на корпусе MOD RD 7).
В версии Separate, подключение кабеля диагностики с К-линией производится к разъему Х1, контакт 2
(метка на корпусе POWER/DIAGN).
Кроме того, с 2005 года, диагностика ECU версий Separate и Premium может производиться через CAN
интерфейс.
Распознавание подъемных осей
Когда прицеп оборудован подъемной осью имеющей датчики скорости, ECU автоматически определяет,
поднята ли данная ось.
Подъемная ось может быть оборудована только датчиками e и f! Установка датчиков c и d в подъемной оси не допускается!
Счетчик километража
VCS II оборудована встроенным счетчиком километража, который подсчитывает пройденное расстояние, при наличии электропитания системы ABS.
Возможны две самостоятельные функции:
1. Счетчик общего километража подсчитывает суммарный пробег ТС с момента первого после монтажа запуска системы. Значение счетчика может быть считано любым диагностическим устройством.
2. Кроме того, имеется и так называемый счетчик промежуточного километража. Значение этого
счетчика можно обнулить в любое время. Таким образом, можно измерить межсервисный интервал (пробег между двумя ТО), либо пробег за определенный промежуток времени. Значение данного счетчика может быть считано и сброшено в ноль при помощи компьютерной диагностической программы или диагностического контроллера. Если после обнуления счетчика промежуточного километража электропитание к блоку ECU было подано во время движения (питание от стоп-лампы через розетку 24N), то в процессе проведения компьютерной диагностики значение счетчика будет показано серым цветом.
В этом случае индицируемое значение счетчика будет слишком мало по сравнению с реальным
пробегом.
Для работы счетчика километража блоку ECU необходимо получать информацию от датчиков скорости
c и d, преобразованную с учетом длины окружности шин и количества зубьев роторов установленных на оси ТС. Стандартные значения калибровки длины окружности шины и количества зубьев ротора составляют 3250 мм и 100 зубьев соответственно. При данных номинальных условиях разрешение счетчика составляет 4,16 мм. Для того чтобы получать более точные значения, в случае, когда размер
смонтированных шин отличается от стандартной калибровки счетчика, калибровочные данные могут
быть откорректированы. Динамические окружности колес представлены в соответствующих таблицах
производителей шин.
Если исходные данные будут неточны или ошибочны, то всегда имеется возможность откорректировать их позже, так как показания счетчика рассчитываются на основе данных, сохраненных в ECU на
текущий момент (количество зубьев, длина окружности и количество оборотов колеса). Погрешность
правильно откалиброванного счетчика километража составляет менее 3% и зависит в основном от
допусков при производстве шины и ее реального износа. Счетчик километража может быть откалиброван посредством компьютерной диагностической программы. Программа предлагает многовариантное меню для стандартных зубчатых роторов. Здесь же можно ввести значение длины окружности шин.
Счетчик километража работает при наличии постоянного электропитания (во время движения), что является причиной, по которой возможно манипулировать его показаниями. При организации
электропитания системы ABS по ISO 1185, либо по ISO 12098 (24N), показания счетчика малоинформативны.
Соответствие зубчатых роторов длинам окружностей шин
Для работы системы ABS необходимо правильно выбрать зубчатый ротор, соответствующий длине
окружности шины, т.к. множество управляющих функций зависят как от скорости вращения колес, так
и от извлекаемых из ее значения абсолютных либо относительных величин. Определенному диапазону
размеров шин соответствует зубчатый ротор с конкретным количеством зубьев.
Внимание!
Понятие стандартной шины для VCS II было определено заново, в соответствие с изменениям произошедшим за последнее время в сфере разработки прицепного транспорта. Прежняя стандартная шина, с длиной окружности 3425 мм, была заменена новой, широко применяющейся в настоящее время и имеющей длину окружности 3250 мм.
Это является причиной, по которой прежня диаграмма соответствия между количеством зубьев ротора и длиной окружности шин более не действительна.
В принципе, каждая из длин окружности шин должна соответствовать определенному количеству зубьев ротора. Данная зависимость проиллюстрирована сплошной центральной линией проведенной внутри зоны, выделенной на диаграмме двумя штриховыми линиями. Для уменьшения количества вариантов используемых зубчатых роторов, каждому из роторов был определен диапазон допускаемых длин окружности шин, основанный на приемлемых допустимых отклонениях. Этот диапазон иллюстрирует зона между двумя штриховыми линиями. Каждая из выбранных комбинаций, между длиной окружности шины и количеством зубьев ротора, должна лежать в пределах указанной зоны. Комбинации лежащие вне зоны допусков запрещены!
Разные размеры шин на разных осях
В особых случаях, бывает необходима либо оправдана установка на разных осях шин разных размеров. Когда разница между длинами окружностей шин не превышает максимальную величину в 6,5%,
подобная установка является допустимой и не оказывает влияния на работу ABS. Если же разница
превышает 6,5% - необходимо произвести параметрирование системы VCS II. Данная процедура исключает необходимость использовать в подобных случаях специальные зубчатые роторы. Параметры
различных размеров шин на разных осях устанавливаются при помощи компьютерной диагностической программы.
Данные, касающиеся соответствия длины окружности шин и количества зубьев роторов каждой оси
должны быть введены, с учетом описанного выше.
Функционирование универсальных выводов GenericIO
Некоторые вариации VCS II оборудованы дополнительными цифровыми входами/выходами и одним
аналоговым входом. Это позволяет осуществлять на прицепе, кроме функции ABS, и множество других
функций. Данные входы/выходы называются обобщенными или универсальными (в Английском
прочтении - Generic Inputs/Outputs или GenericIO).
Наличие GenericIO в версиях VCS II:
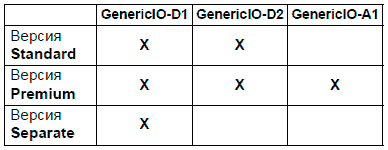
Функциональное назначение выводов GenericIO задается при параметрировании системы ABS.
В состоянии поставки системы с завода - изготовителя все GenericIO деактивированы.
При помощи компьютерной диагностической программы можно установить следующие, заранее
определенные функции для GenericIO:
- Датчик износа тормозных накладок
- Интегрированный переключатель, зависимый от скорости (Integrated Speed Switch - ISS)
- Источник электропитания
- Сигнал скорости
- Интерфейс ECAS
- Интерфейс ELM
Каждому из выводов может быть присвоена только одна функция. При активировании сразу двух выводов (пары функций), могут быть заданы дополнительные параметры, позволяющие адаптировать их функционирование в соответствие с требованиями заказчика.
В случае возникновения неисправности, необходимо, чтобы оборудование или механизмы управляемые через универсальные выводы GenericIO были возвращены в безопасное для дальнейшей эксплуатации ТС состояние. Например, при обрыве электропитания, текущее положение подъемной оси должно быть зафиксировано для обеспечения безопасности.
Позаботиться о подобных функциях и возможностях - непосредственная задача производителей транспортных средств.
Износ тормозных накладок
Датчики износа тормозных накладок определяют и индицируют степень износа тормозных накладок
дисковых тормозов в два этапа. Слежение за степенью износа производится при помощи сменных
индикаторов износа (612 480 040 2), которые монтируются непосредственно в накладках тормозных
колодок и, в случае износа накладок, генерируют короткое замыкание на массу (для этого необходимо
наличие электрического контакта между тормозным диском и минусом аккумуляторной батареи
(массой)), а так же производят разрыв подключенной к ним электрической цепи. Замыкание на массу
означает, что накладки достигли так называемого предварительного уровня износа.
Индикация износа тормозных накладок реализована через один из цифровых универсальных выводов
GenericIO. Данный Вход/Выход необходимо подключить к контакту 3 жгута кабелей индикаторов
износа WABCO - 449 834 013 0. Контакт 2 этого жгута, должен быть соединен с массой, контакт 1 остается не подключенным. Для подключения жгута индикаторов износа к выводу GenericIO D1, в версиях Standard и Premium, WABCO предлагает кабель 449 619 000 0. В этом жгуте все индикаторы износа соединены последовательно
Пример реализации подключения индикации износа

ECU фиксирует износ сразу же после появления сигнала о замыкании на массу, либо обрыва в цепи хотя бы одного из датчиков износа во время движения. До тех пор пока изношенные тормозные колодки
и соответствующие им датчики износа не заменены, последовательные вспышки контрольной лампы
будут индицировать наличие износа накладок при каждом включении зажигания. Соответствующая
информация так же передается и через CAN интерфейс, при условии, что он имеется в наличии и
активирован.
Настройка соответствующего входа GenericIO должна быть произведена при параметрировании
выводов GerericIO. Описанный выше жгут индикатора износа подключается к выводу GenericIO D1.
Кроме того, индикацию предварительного уровня износа можно отключить.
Предварительный уровень износа
При износе накладок до уровня, когда оголяется проводник одного из датчиков износа, в подключенной к ним электрической цепи возникает короткое замыкание на массу (для этого необходимо наличие электрического контакта между тормозным диском и минусом аккумуляторной батареи (массой)). Это означает, что достигнут предварительный уровень износа. Индикация предварительного уровня износа задается при установке параметров. В стандартном наборе параметров она отключена.
Окончательный износ
Регистрируется во время движения, при разрыве электрической цепи датчиков износа, произошедшем более чем на 1 сек. Во время следующего включения системы, миганием контрольной лампы индицируется окончательный износ тормозных накладок.
Предупреждение
Водитель информируется при помощи контрольной лампы. При каждом включении зажигания контрольная лампа мигает. При достижении предварительного уровня износа мигание становится цикличным.
Это будет один цикл, состоящий из четырех одинаковых импульсов длительностью 500мс и 500мс
паузами между ними. При достижении уровня окончательного износа. Мигание происходит в течение
четырех циклов с 4сек. паузами между ними.

Лампа начинает мигать спустя примерно 4сек. после включения зажигания. Мигание прерывается, когда
ECU определяет наличие движения (сигнала скорости). Индикация наличия активной неисправности
так же имеет преимущество и накладывается на индикацию износа. С другой стороны, индикация
износа имеет преимущество по сравнению с выдачей сигнала об окончании межсервисного интервала.
Сброс состояния индикатора износа Система автоматически идентифицирует новые индикаторы износа, после того, как тормозные колодки были заменены, а транспортное средство однажды превысило скорость в 40км/ч, и затем снова было остановлено (при постоянном электропитании по ISO 7638).
Подобное движение можно симулировать и на неподвижном ТС, трижды, с периодом в 2 секунды,
последовательно включив питание ECU через Кл.15, а затем как минимум на 5сек. снова. При успешно
прошедшем сбросе состояния индикатора износа, после четвертого включения питания контрольная
лампа выдает лишь три вспышки первого цикла.
Интегрированный переключатель по скорости (ISS)
Интегрированный (встроенный) переключатель по скорости позволяет активировать либо блокировать
различные функции ТС, зависящие от скорости.
Например, имеется возможность включать и выключать электрические реле или электромагнитные
клапаны в зависимости от величины скорости. В зависимости от скорости можно управлять такими
широко применяемыми на ТС функциями как:
- Блокировка поворотных осей при достижении определенной скорости.
- Подъем либо опускание подъемных осей, в зависимости от скорости.
Выбранный выход Generic IO переключается при превышении ТС установленного порога скорости.
Следующее переключение невозможно до тех пор, пока скорость ТС не упадет на 2 км/ч ниже установленного порога (гистерезис). В связи с тем, что минимально допустимое значение скорости для ECU составляет 1.8 км/ч, переключение выхода с порогом скорости установленным ниже 3.8 км/ч произойдет лишь один раз.
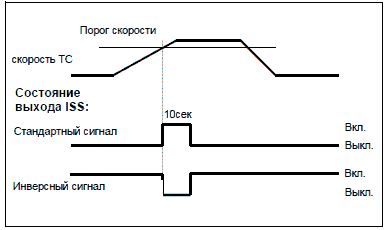
Параметрированием могут быть заданы три различных функции ISS:
- Стандартная функция ISS
- Импульс длительностью 10 секунд
- Импульс длительностью не менее 10 секунд
Эти функции реализуемы при помощи выводов GenericIO D1 или D2.
Уровень выходного сигнала постоянно контролируется системой и в случае возникновения отклонений
(короткое замыкание) система генерирует сообщение о неисправности. Более того, при задании
соответствующих параметров, можно осуществлять контроль электрической нагрузки (обрыв кабеля)
подключенной к выходу. Максимальное сопротивление подключаемой к выходу нагрузки может
составлять 4кОм.
В случае подключения более высокоомных потребителей, для того, чтобы подавить тестовые импульсы посылаемые ECU, будет необходим дополнительный нагрузочный (подтягивающий) резистор.
Для реализации описанных функций существует множество различных вариантов кабелей (см. обзор
кабелей VCS II).
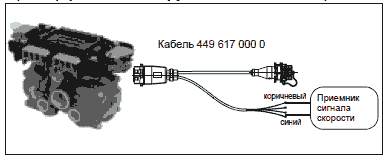
Пример реализации функции ISS:

В данном примере функция ISS реализована через GenericIO D1. Если используется выход GenericIO
D2, то вместо синего провода должен быть подключен красный.
Стандартная функция ISS
Параметрируемое пороговое значение скорости, при котором происходит переключение состояния
выхода обязательно должно находиться в диапазоне от 1,8 до 100 км/ч. При параметрировании значения порога переключения вне указанного диапазона, выход переключаться не будет. Выход переключается в тот момент, когда значение скорости достигает установленного порога. Если скорость ТС начнет снижаться, то обратное переключение состояния выхода произойдет не ранее чем ее значение станет меньше значения установленного порога на величину гистерезиса, составляющего 2 км/ч.
Данная функция (выходной сигнал) может так же быть инвертирована.

Импульс длительностью 10 секунд
Данная функция GenericIO так же оценивает значение скорости ТС. В отличие от стандартной функции
ISS, при превышении установленного значения скоростного порога, выход включается ровно на
10сек. (10 сек. импульс). По истечении этого времени выход вновь отключается вне зависимости от условий движения ТС. В основном это используется для устройств управления и функций, которые не допускают наличия постоянного управляющего сигнала. В остальном, функционирование схоже с ISS.
Импульс длительностью не менее 10 секунд
Третьим вариантом функции ISS является Импульс длительностью не менее 10 секунд. Управление
прекратится не ранее чем через 10 сек. после превышения заданного скоростного порога. Даже если
за это время скорость ТС упадет ниже порога переключения, выход переключаться не будет.
Более того, выход останется включенным до тех пор, пока скорость ТС будет превышать значение
установленного порога переключения. Таким образом, 10ти секундный период может быть продлен.

Сигнал скорости
Сигнал скорости несет информацию о скорости ТС и генерируется на основе скорости колес имеющих
датчики. Это импульсный частотно-модулируемый сигнал, обеспечивающий информацию о скорости.
Детальное описание данного сигнала включено в системную спецификацию 400 010 203 0.
Данная функция реализуется через вывод GenericIO D1 (контакт Х6.1) или D2 (контакт Х6.2).
Уровень выходного сигнала постоянно контролируется системой и в случае возникновения отклонений
(короткое замыкание) система генерирует сообщение о неисправности. Более того, при задании
соответствующих параметров, можно осуществлять контроль электрической нагрузки (обрыв кабеля)
подключенной к выходу. Максимальное сопротивление подключаемой к выходу нагрузки может
составлять 4кОм.
В случае подключения более высокоомных потребителей, для того, чтобы подавить тестовые импульсы посылаемые ECU, будет необходим дополнительный нагрузочный (подтягивающий) резистор.
Для реализации описанных функций существует множество различных вариантов кабелей.
Пример реализации функции сигнала скорости
В данном примере функция ISS реализована через GenericIO D1. Если используется выход GenericIO
D2, то вместо синего провода должен быть подключен красный.
Источник электропитания
Выход электропитания позволяет запитывать вторичные системы. Это помогает так же включать
вспомогательные функции.
Выход включается синхронно с Кл.15. В остальных случаях данный выход обесточен. Когда уровень
рабочего напряжения на Кл.30 становится слишком низким, выход электропитания деактивируется в
зависимости от оборудования. Токонесущая способность выхода ограничена уровнем 1А. В случае
подключения к нему индуктивной нагрузки, необходимо ограничить индуктивный выброс напряжения,
возникающий на нагрузке при отключении питания, при помощи подходящих устройств (диодов).
Установкой соответствующих параметров, за счет наличия напряжения на Кл.30, можно обеспечить
подачу электропитания с данного выхода на время от 0 до 10сек. после выключения зажигания - Кл.15,
(функция Overshoot-задержка отключения электропитания).
Все это время ECU и выход электропитания останутся включенными, для того чтобы дать возможность подключенным к ним устройствам завершить текущие операции. Данная функция реализуется через вывод GenericIO D1 или D2.
Уровень выходного сигнала постоянно контролируется системой и в случае возникновения отклонений
(короткое замыкание) система генерирует сообщение о неисправности. Более того, при задании
соответствующих параметров, можно осуществлять контроль электрической нагрузки (обрыв кабеля)
подключенной к выходу. Максимальное сопротивление подключаемой к выходу нагрузки может
составлять 4кОм.
В случае подключения более высокоомных потребителей, для того, чтобы подавить тестовые импульсы посылаемые ECU, будет необходим дополнительный нагрузочный (подтягивающий) резистор.
Для реализации описанных функций существует множество различных вариантов кабелей.
Пример реализации функции электропитания

В данном примере функция ISS реализована через GenericIO D1. Если используется выход GenericIO
D2, то вместо синего провода должен быть подключен красный.
Интерфейс ECAS
Для подключения ECAS используется вывод GenericIO D1. Данный интерфейс включает в себя
так же диагностическую К-линию и, если это будет необходимо, выход для зарядки аккумуляторной
батареи контакт Х6.4 в блоке ABS версии Premium.
Система ECAS получает электропитание через вывод GenericIO D1.
При этом задержка отключения электропитания (Overshoot) устанавливается на 5сек. За указанный период времени ECAS-ECU, посредством обмена данными, получает необходимую для завершения работы информацию. Выход постоянно контролируется на отсутствие коротких замыканий и обрывов.
Диагностическая К-линия подключается к ECAS-ECU для того, чтобы обеспечить обмен рабочими
данными через данный интерфейс.
Посредством этого интерфейса, оба электронных блока обмениваются информацией об условиях
своей работы. VCS II передает по К-линии информацию о скорости, а ECAS посылает рабочие данные, которые VCS II в свою очередь преобразует для передачи через интерфейс между тягачом и прицепом в соответствие со стандартом ISO 11992 (CAN). Таким образом, данные становятся доступны системам, установленным на тягаче.
Если на прицепе установлена аккумуляторная батарея, то она может заряжаться через вывод Х6.4
блока ABS версии Premium. При выключенном зажигании напряжение поступает к аккумулятору
через Кл.30. При включенном зажигании, данный выход контролируется системой VCS II. В то же
время, этот выход является источником электропитания и для диагностических устройств.
ECAS интерфейс реализован в блоках управления версий Standard и Premium.
Для подключения ECAS существует множество различных кабелей.
Пример подключения системы ECAS.

В данном примере показан кабель, использующийся при конфигурации ABS 4S/3M. С конфигурациями
4S/2M или 2S/2M используется кабель 449 336 000 0.
Интерфейс ELM
Для обеспечения электропитания системы ELM используется вывод GenericIO D2. Данный интерфейс так же включает в себя вывод GenericIO D1 используемый для передачи сигнала скорости.
ELM запитывается через GenericIO D2.
Задержка отключения электропитания (функция Overshoot) при этом отсутствует. Выход постоянно контролируется на отсутствие коротких замыканий и обрывов.
ELM интерфейс реализован в блоках управления версий Standard и Premium.
Для подключения ELM существуют соответствующие кабели.
Пример подключения системы ELM

Список световых мигающих кодов
Код неисправности Наименование компонента
- 3 Датчик скорости BU1 (H2) c
- 4 Датчик скорости YE1 (H1) d
- 5 Датчик скорости BU2 (Z2) e
- 6 Датчик скорости YE2 (Z1) f
- 7 Внешний модулятор RD (L)
- 9 Впускной клапан внутреннего модулятора 2
- 10 Впускной клапан внутреннего модулятора 1
- 11 Выпускной клапан внутреннего модулятора
- 14 Электропитание
- 15 Внутренняя неисправность ECU
- 18 Неисправность GenericIO
Одновременное подключение нескольких VCS систем

(с использованием Инфо Модуля (Info Module)

Замена VCS I на VCS II
VCS I : Варианты с электропитанием по ISO VCS II : Версия Separate (отдельный ECU)

VCS I : Варианты со смешанным электропитанием VCS II : Версия Premium
